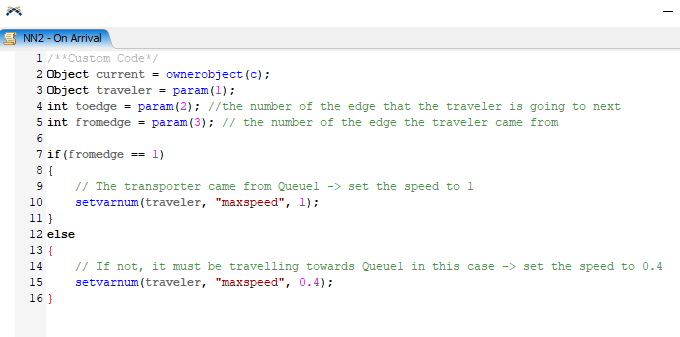
Hi I want to construct a model where the AGV decelerates its speed to 1 -> 0.4 m/s before it gets to the path.
But I don't have a good idea, can you give me a model or example you can recommend?
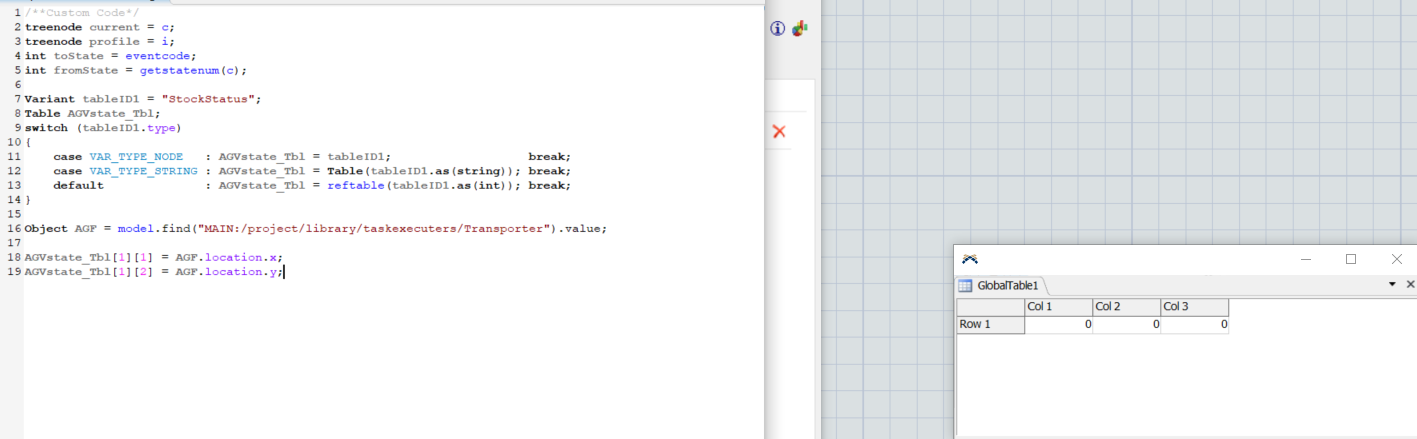
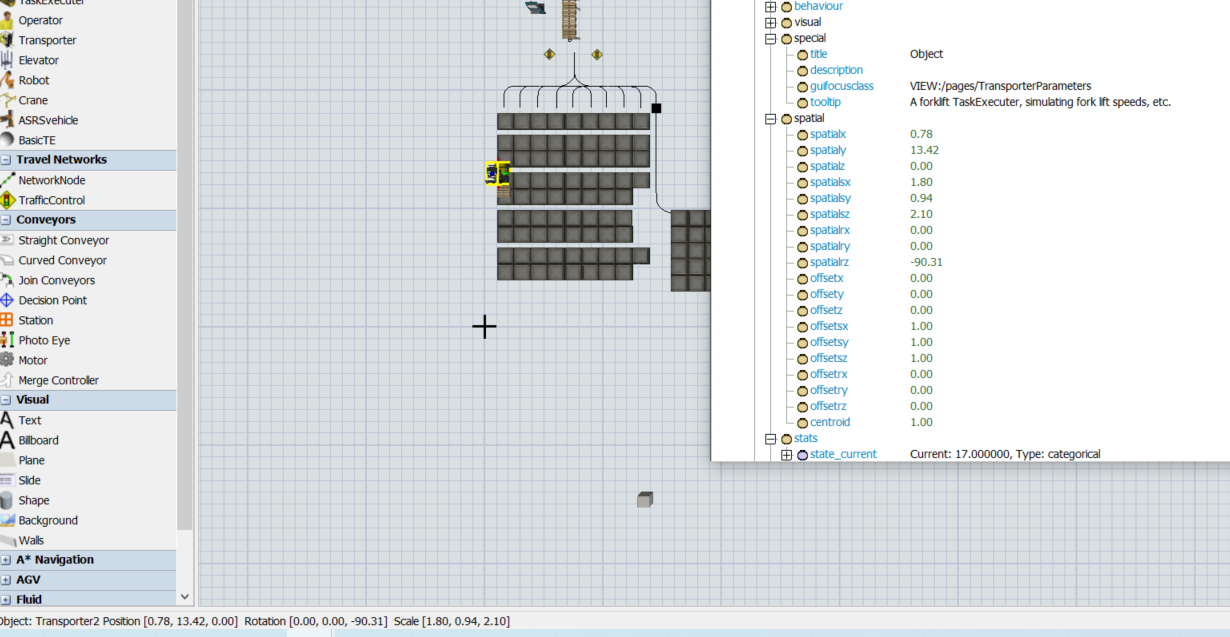
There is a model I want to apply below. I made it as a networknode. Should I make it an AGV path?