Hi~ this is my current model: test.fsm
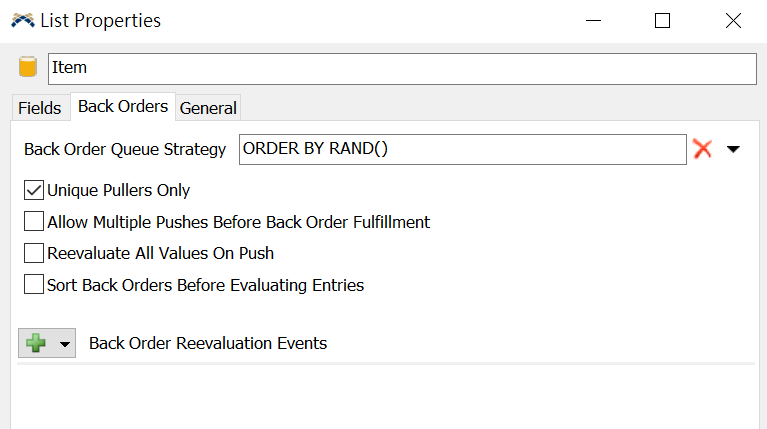
I set the random to select processor in the list:
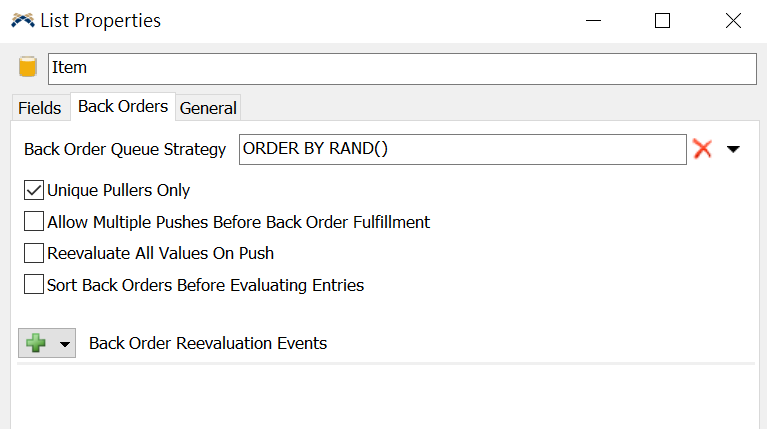
Therefore, the AGV will sent item to processors in a random order.
Currently from my process flow settings, after my AGV sent the item to a random processor it will check if there is already a finished item, if there is a finished item the AGV will take the item to the sink immediately.
I will like to change the logic to every time the AGV pass by a processor it will check if the processor have a finished item, and take the item if the AGV's current loading item is less than 5. Hope to get some suggestions to revise my process flow to implement these settings, thanks!!!

{kind=link}