hello everyone.
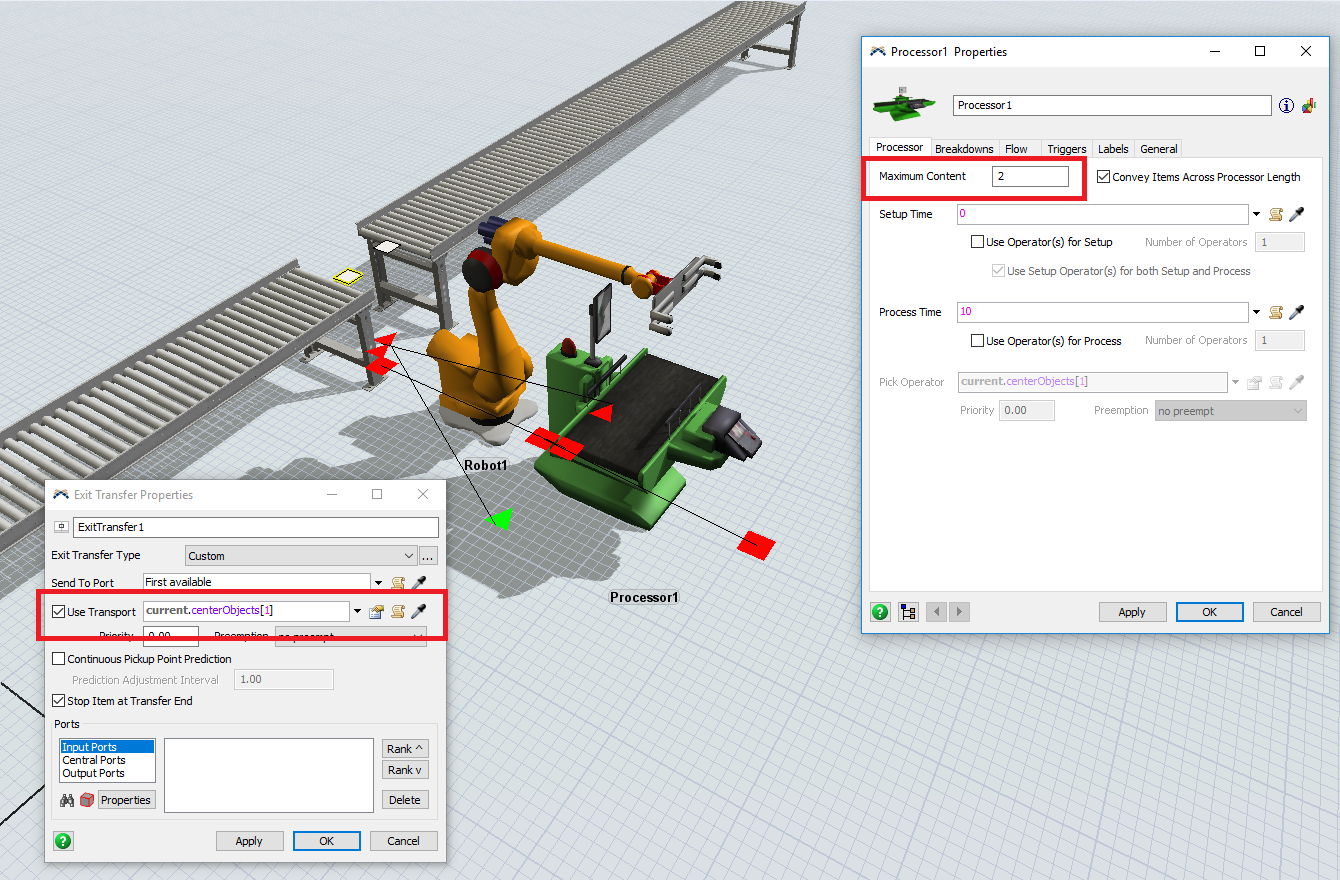
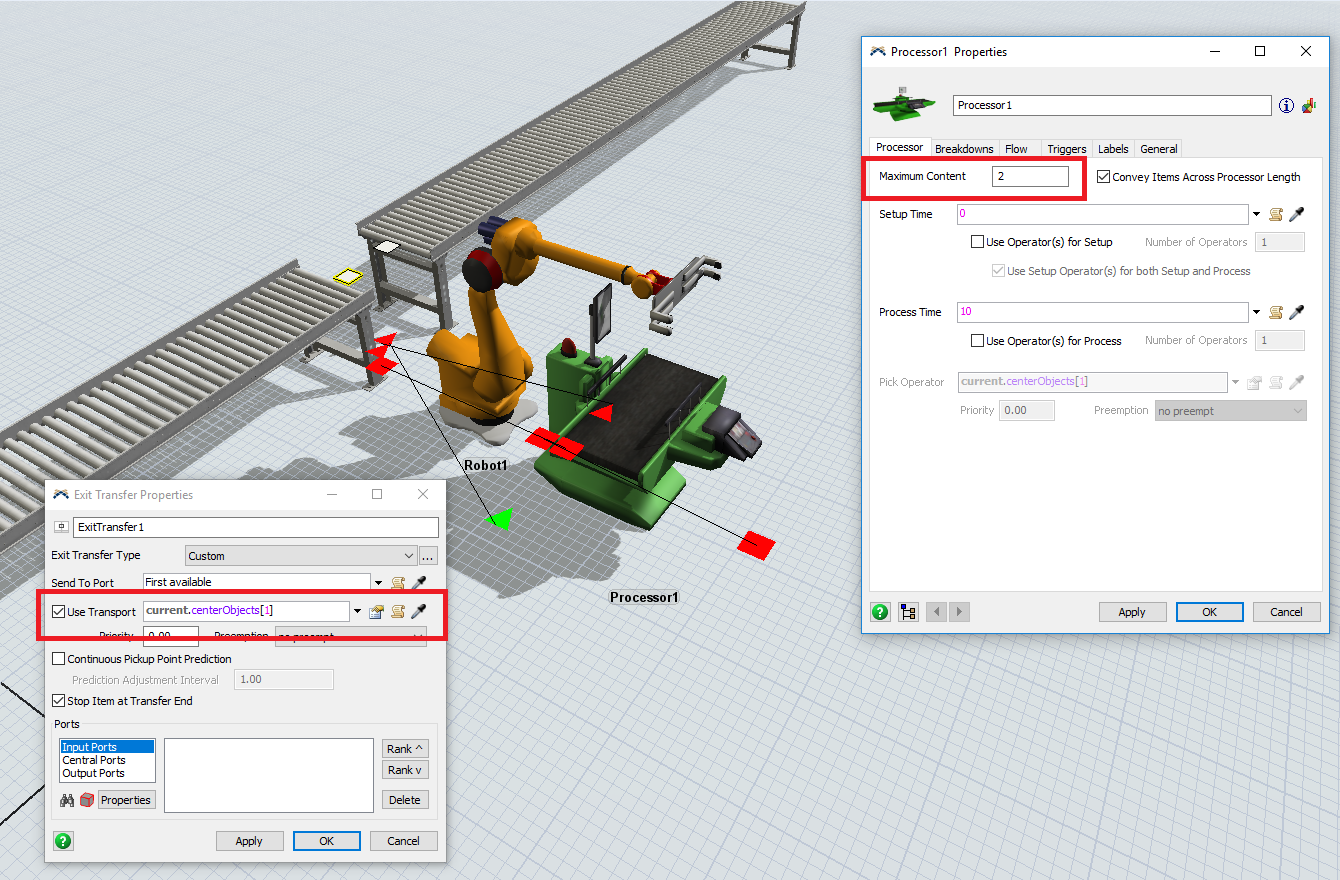
my simulation have a robot arm. This robot take a part in a conveyor and load a processor. this same robot unload processor and put this part at next queue.
i need change just one thing. when the processor works, the robot need take a part in a conveyor and wait in front a processor with the part in your hand. When the processor finish a task, the robot unload a finish part and load the part with no process. SIMULTANEOUSLY.
{kind=link}
{kind=link}