Hi,
I am using a BasicTE (looking as a reach stacker) for picking up a container.
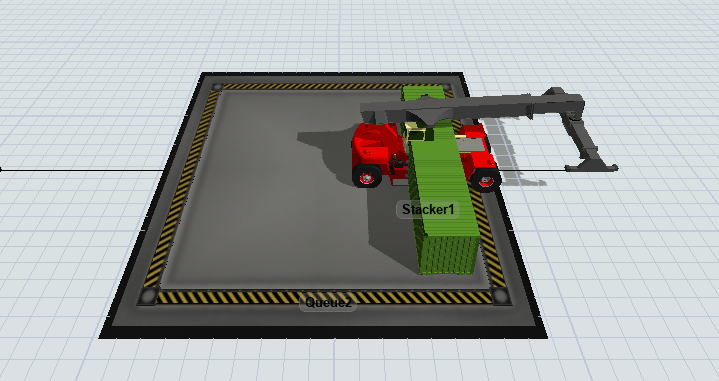
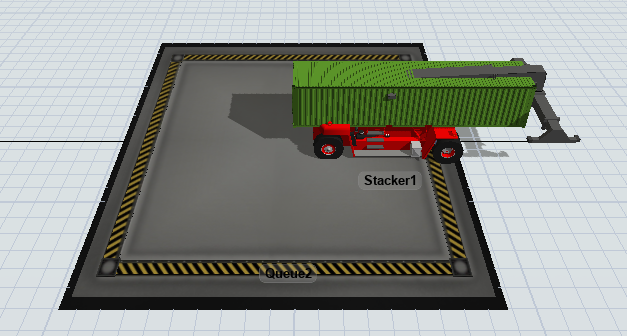
Is there a way for making the stacker stopping at the right position and not going into the container for the loading task (see pic1)? Is there a way to access and change the object's point on which the loading takes place (see pic2)? I would like it to happen where the gripper is.
Thanks!