Hello,
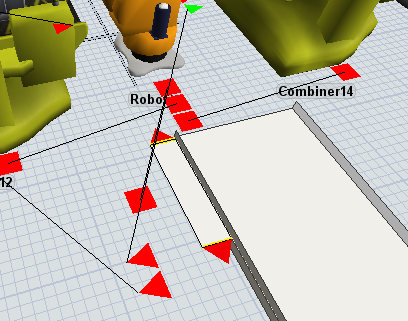
I wish to model a robot arm filling container with 5 box item. After it reach 20 box per tote container, the tote (containing 20) would then be transferred by an exit conveyor. My current problem:
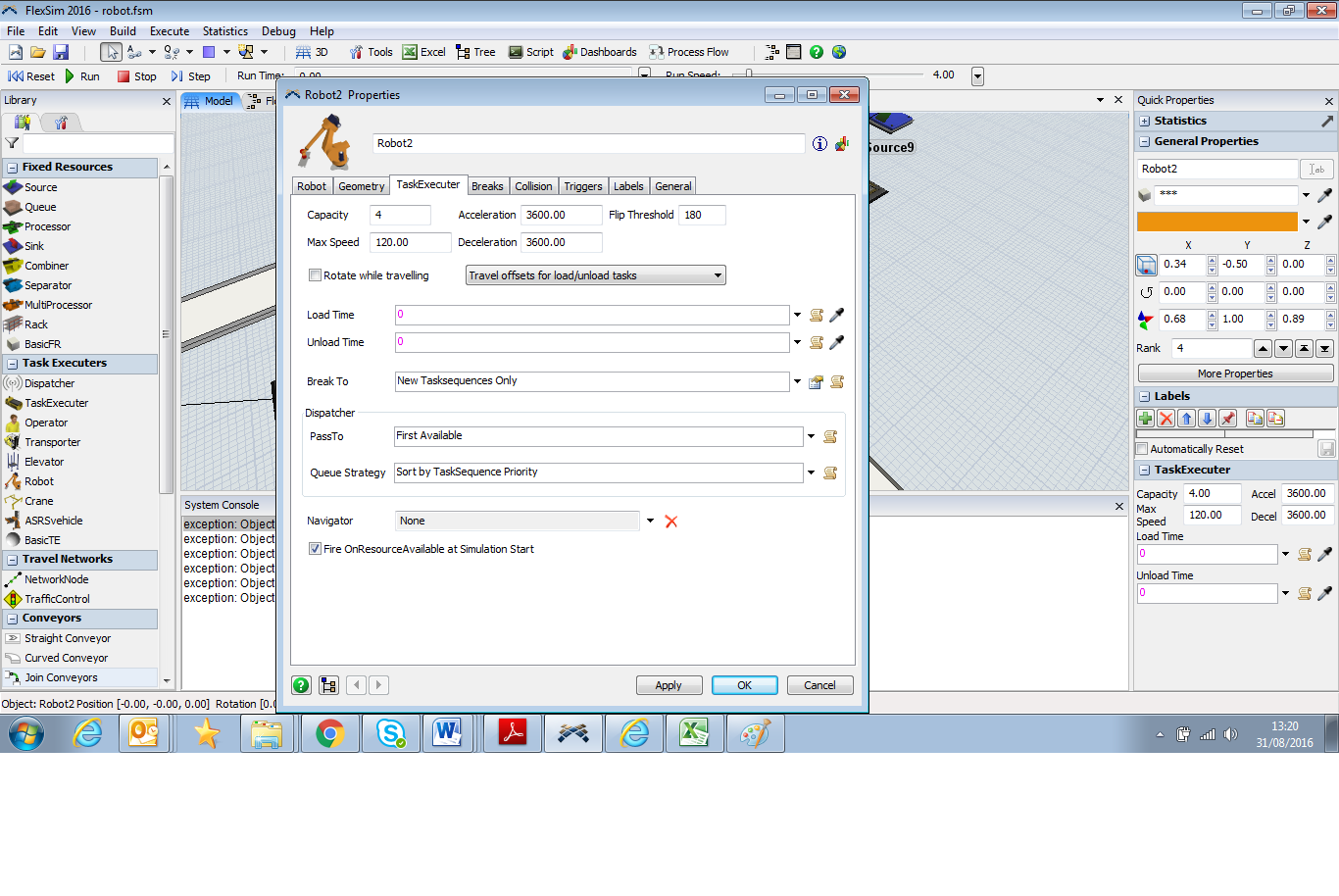
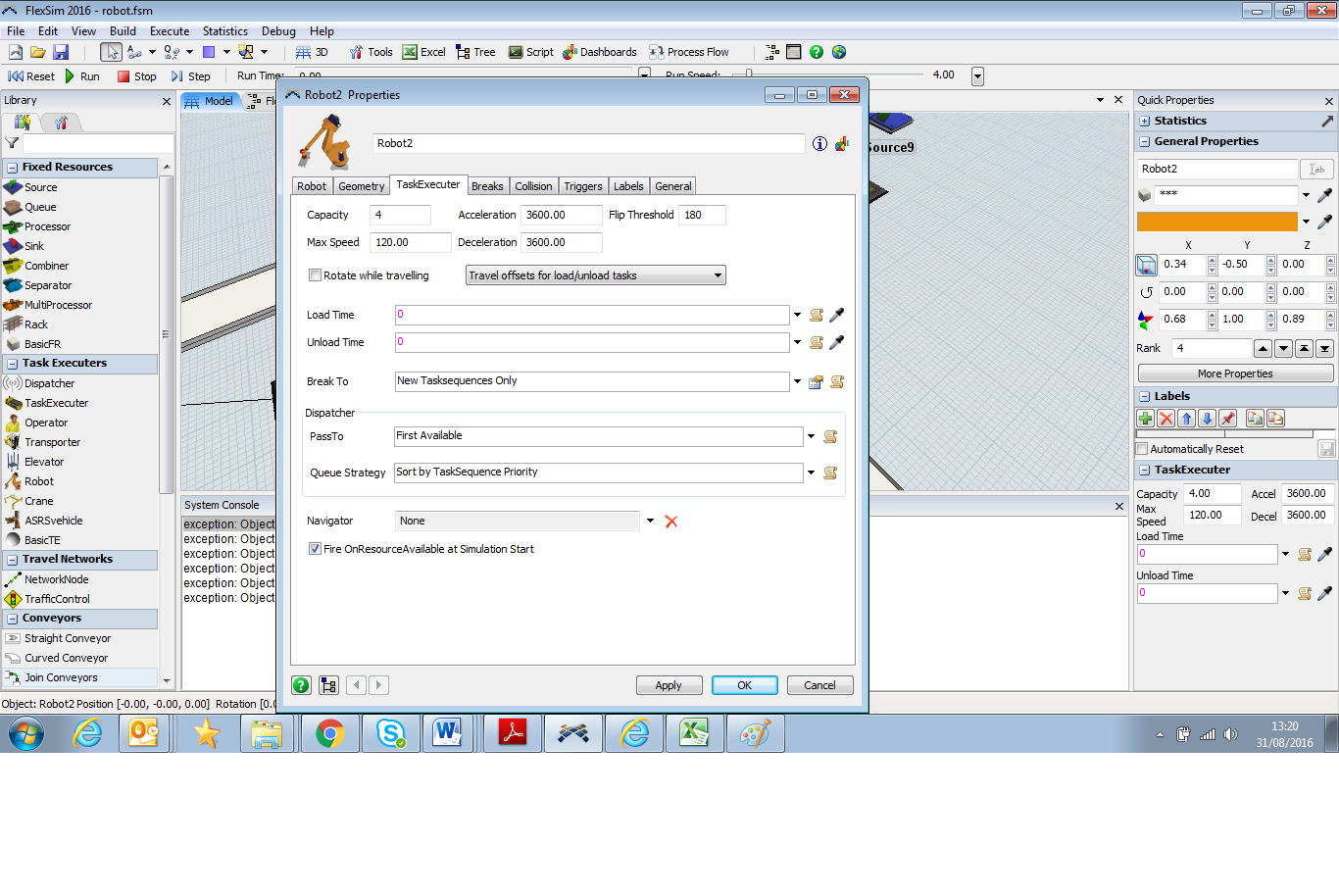
The robot is already set to held 4 item as capacity. Conveyor also a slug builder with release at 4 item. Combiner require 20 flowitem box. But this setup only work so that robot only held 1 at a time, not 4 as intended. Is there something wrong within this model?
Plus it exert error message exception: Object /StraightConveyor6 is a slug building conveyor and should not have transfers along its length. every time.
Thanks a lot for your help
Best regards,
Edwin
{kind=link}