hub-weld-cell.fsmI have a weld cell that I am trying to simulate. There are 5 welding robots and 5 material handling robots. I would like to be able to use photo eyes at each of the spurs to tell the decision point where to send the item. The items are all the same type. Also how would I make sure that the item is placed on top of the table each time.
As for your conveyor routing logic, I'm not sure how best to help you because as far as I can tell, your items are being routed correctly. Give me more specifics regarding your routing questions, and I'll see what I can do to help out. For the most part, you should be doing your routing with the aid of the Decision Points on the conveyor. Don't use the Photo Eyes unless you want specific photo eye type behavior. The attached model demonstrates simple routing using decision points.
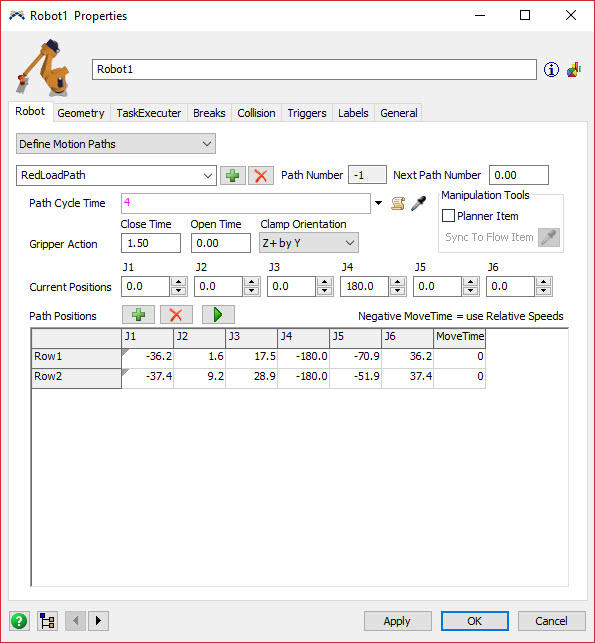
As for the items not placing themselves on top of the table... I think you're fighting with the internal behavior of the Processor object you used to model the table. The default position of an item entering a Processor object is down below the top of the object. You can use an entry trigger as suggested in an earlier answer to modify the z location of the item, but your next problem will be to control your robots so that their motion looks more realistic. In the attached model, I created motion paths for both the transport robot and the welding robot so you can see how this is done. I found the "Manipulation Tools" on the following Robot tab to be useful in defining the path positions.
{kind=link}
Thank you for the help. The robot placement makes sense now. The main issue for the conveyor logic that I am having is making sure that the first two short conveyors on the incoming conveyor don't fill up and block the flow of incoming parts to the other 3 robots. I assume its more of a timing issue and the placement of decision points. All the parts that are on the main conveyor are the same part. i am trying to figure out a way to equally load all of the robots.
Yes, it's definitely a timing issue. I'm guessing, this is one of the design points you'd like to study with your simulation model. To begin with, you will probably want to try a simple round robin assignment scheme starting with the furthest robot down stream and ending with the closest robot. However, this routing scheme will only give favorable results if the processing rate for all stations is the same; otherwise you will want to develop a more intelligent routing scheme that sends items to the station with the shortest queue. With this sort of routing scheme, the max size of the station queue will also be a design parameter. You might also need to concern yourself with what happens if any of the stations goes down for some unplanned reason. As you routing logic becomes more complex, you would do well to use a Process Flow algorithm to determine the station assignments and conveyor control logic. If you're new to Process Flow, you might want to create a simpler model to test your ideas out on while learning the ropes.
eflexsim-projectsgpflexsim-forum-exer-models11029.fsm (83.1 kB)
You can set the item location in the processor when OnEntry trigger.
I set the item location in LOAD A1 processor OnEntry trigger.
I hope it will help your issue.
9 People are following this question.