Hi @anthony.johnson,
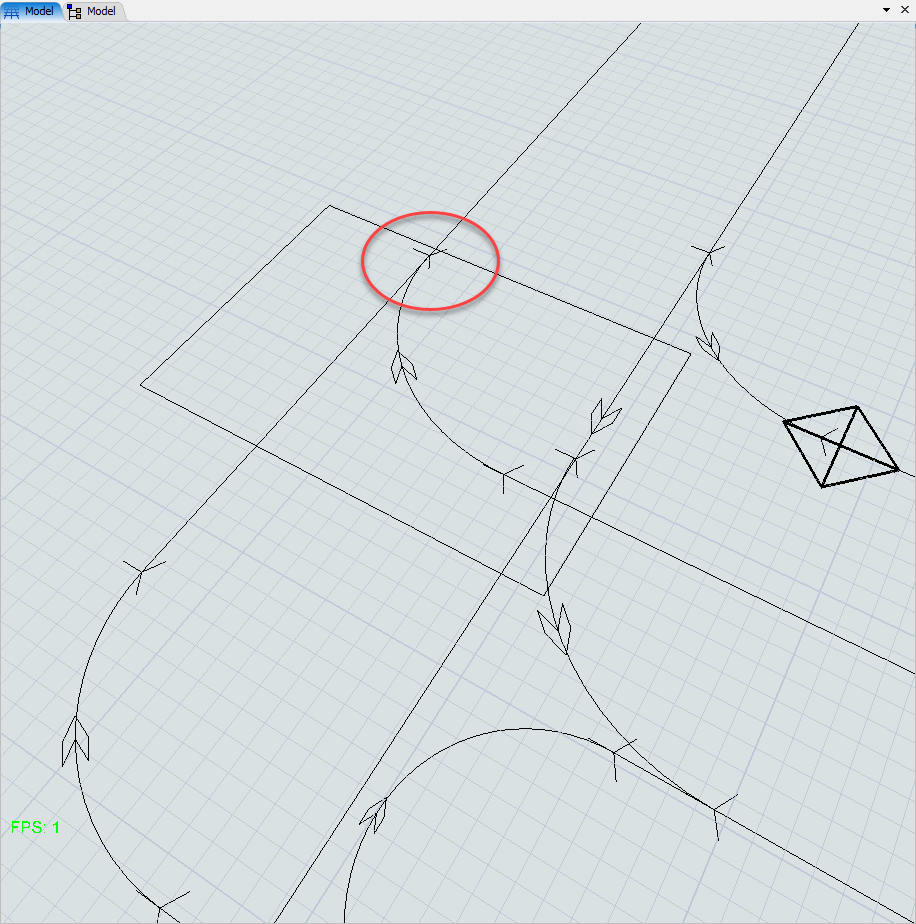
I have an AGV network, but it is not working correctly. In the attached demo model you can see the problem. The AGV travels over multiple control areas, but they are not released. You can see this in the attached picture (the red line is the path the agv took)
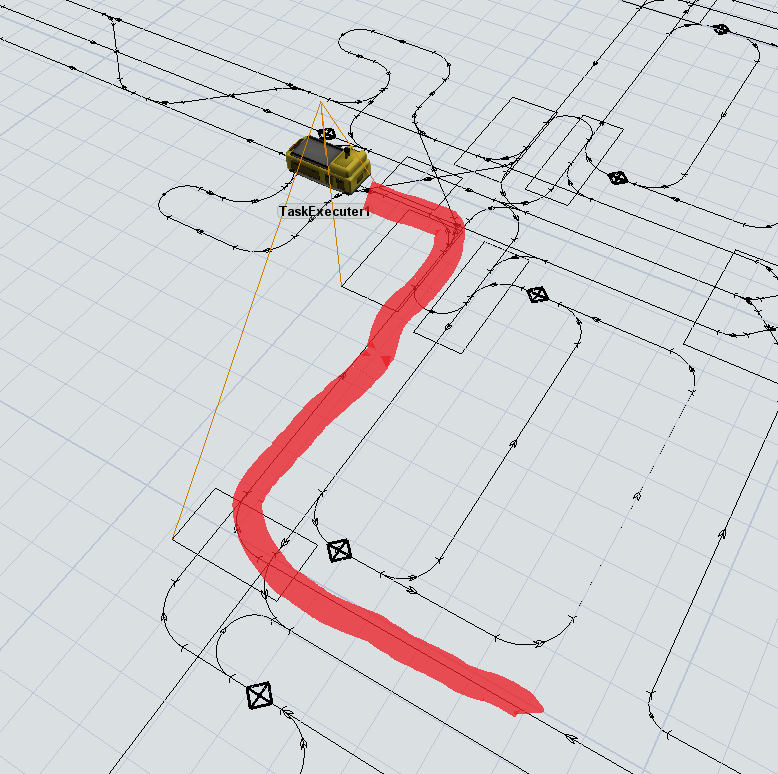
As you can see the AGV still has two areas claimed. I have set the deallocation type to deallocate when past current, so they should have been released.
Can someone figure out what is going wrong?
The AGV paths, areas and control points are in a plane, but that is not causing the problem. I have copied the paths ect back to their default location and that did not help. I have also tried this demo model in the 2018 beta, but that did not make any difference.
Thank you in advance,
Patrick Zweekhorst
{kind=link}