PFA my model. I'm trying to accomplish the following, I'm not sure what I'm missing.
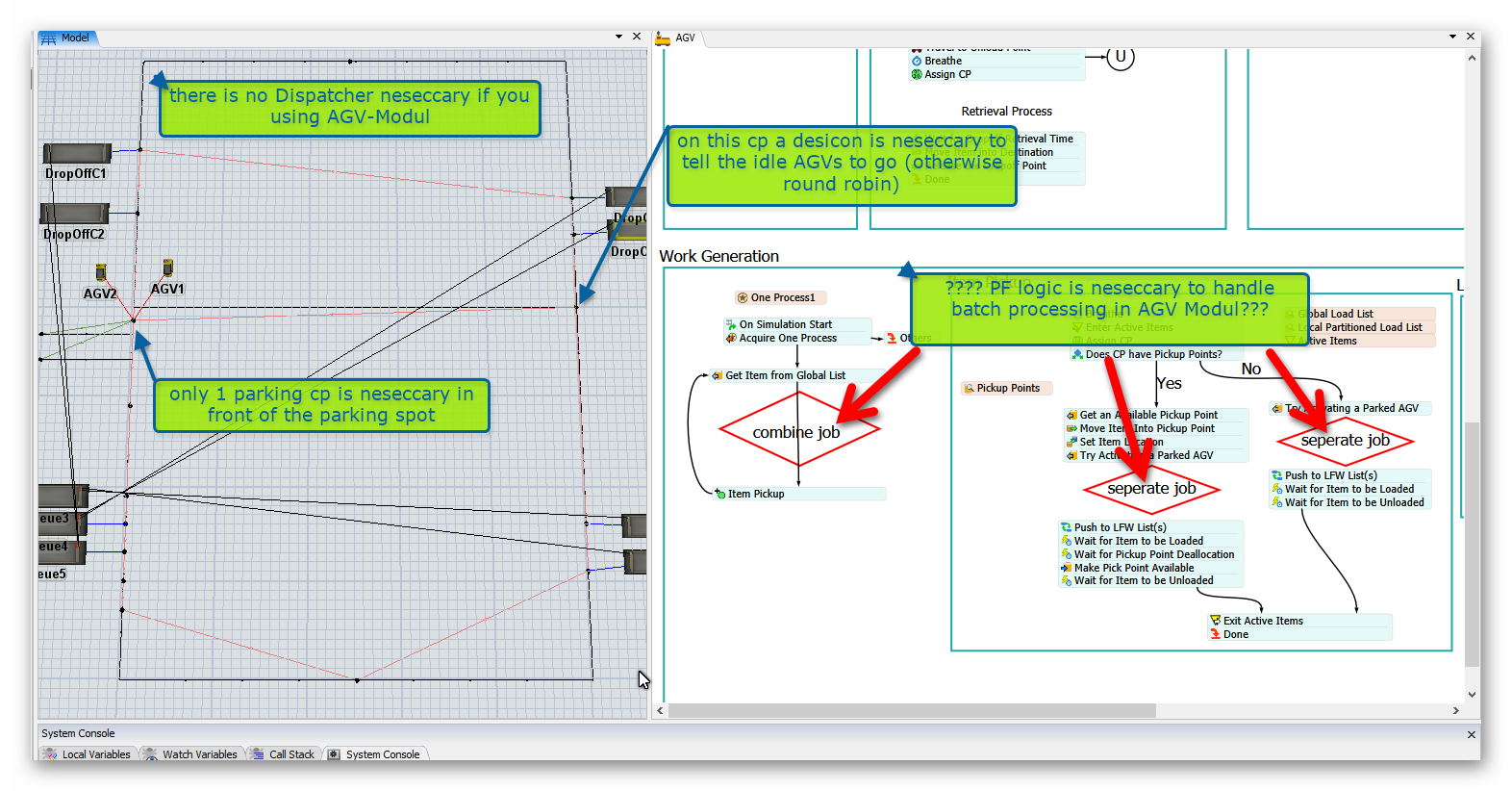
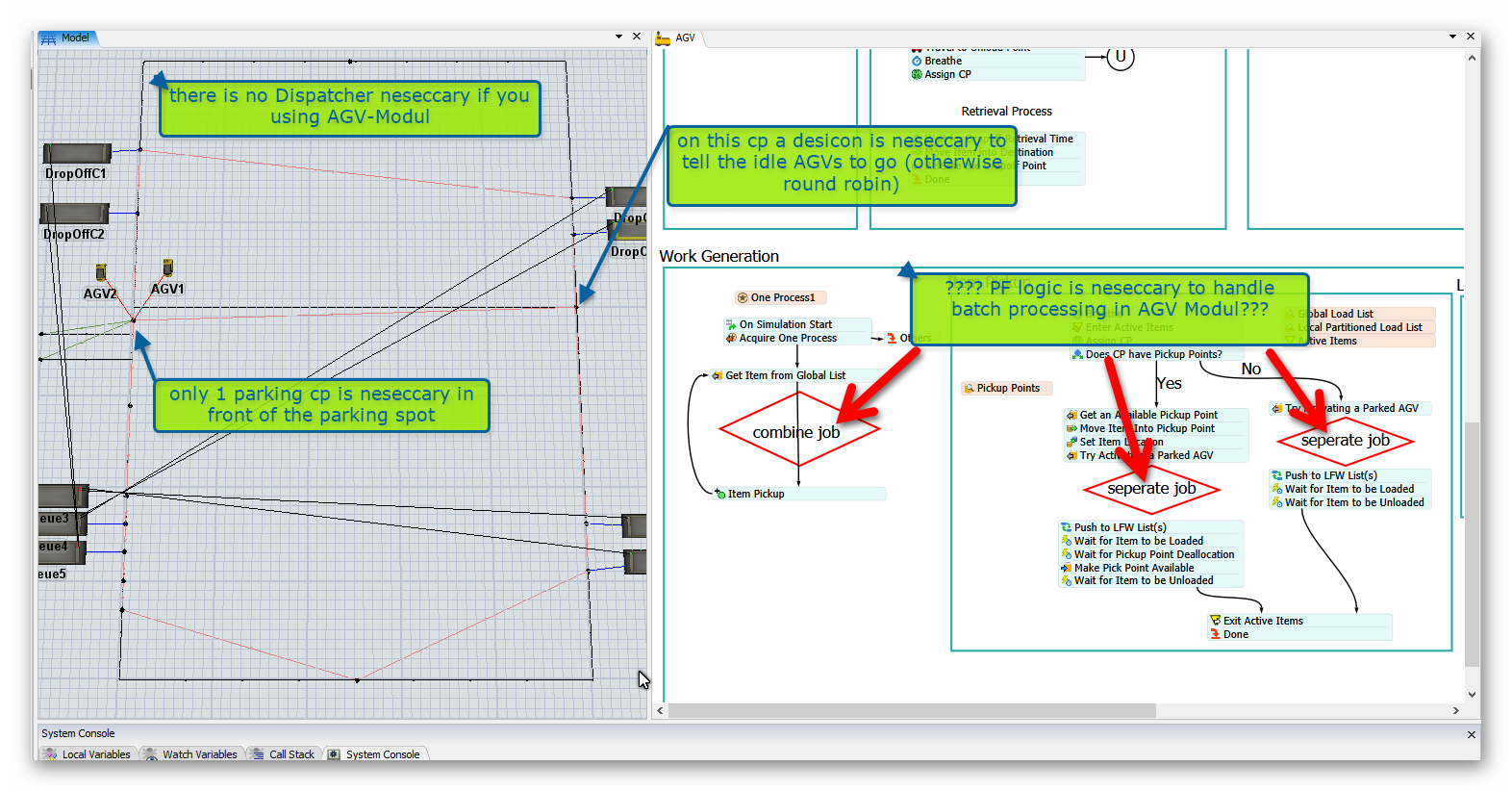
1. I want AGV1 to execute the load-unload task while the AGV2 waits for the next load task, and remains in its park point until called. (currently, the agv2 follows agv1 empty, with no task whatsoever)
2. I want both AGVs to unload all 3 pallets at the first drop off location if available, if not unload at the second drop off location available.(currently, the agvs drop off 2/3 pallets in first location and 1/3 pallets in the second location)
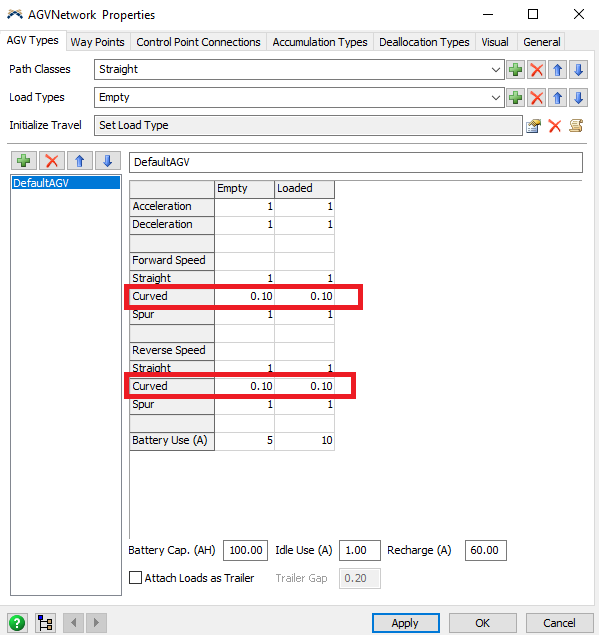
3. How do I make the AGVs travel at a different speed while moving through a corner, can they decelerate and accelerate appropriately?
Thanks.ept1.fsm
{kind=link}
{kind=link}