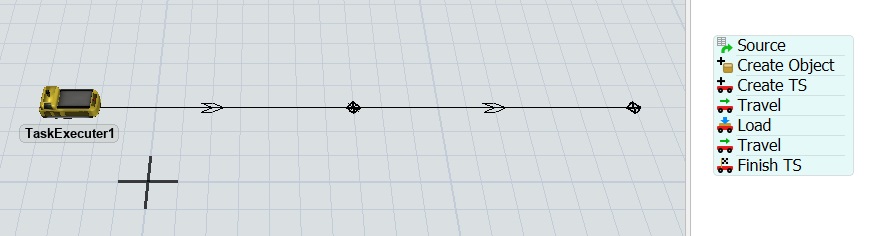
The attached model has an AGV, two paths, and three control points.
The first path has a conditional rule that the AGV cannot pass if it is carrying an item.
When the simulation starts, a box is spawned at the second control point.
The AGV moves to the second control point and loads the item.
Then AGV tries to move to the third control point, but gets a navigation error, even though it has already passed the first path with the above rule applied.
Is there a way to resolve this error without changing the rule?
Thanks in advance.