I tried to make an avoid lanes for AGV, but it didn’t work.
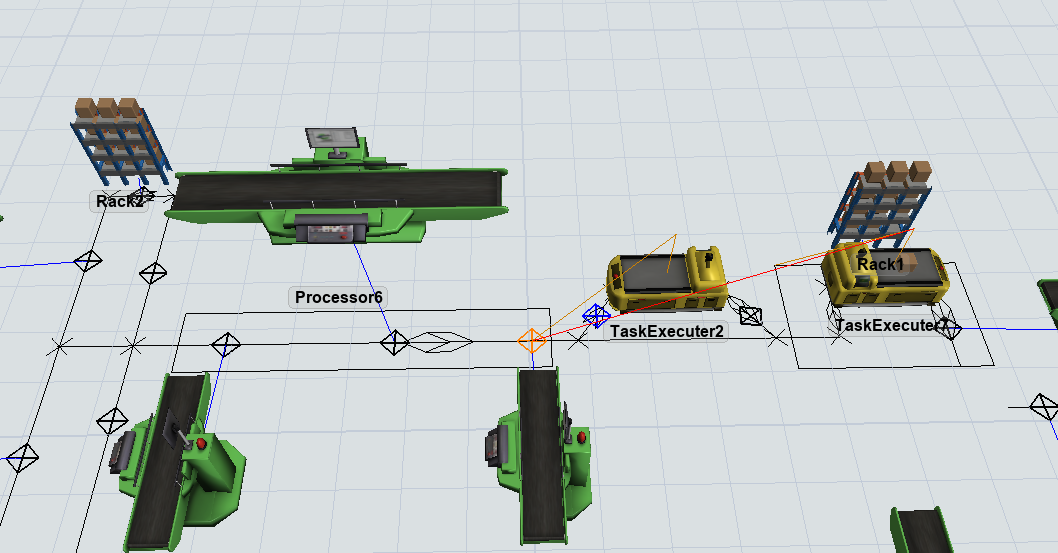
I checked the CP allocation and found that when TaskExecuter2 passed the blue CP, it still continued to occupy the orange CP. (Occurs around second 410 of the model)
I want to know how to correct it.
 Attached is my model and the test model. The test model works successfully.
Attached is my model and the test model. The test model works successfully.