Hi Team,
I am a new FlexSim learner. I am learning about robot simulation with FlexSim at the moment.
I build the model with 2 conveyors, input and output. 1 Processor.
The robot I want to build can run in phases: Load item in - Stand by - Load Item out
The process is:
Phase 1: The conveyor loads the item in, and the robot picks up the item and puts it into the processor, the robot goes to the standby position.
Phase 2: when the processor finish, the robot starts from the standby position, loads the item out, and places it on the output conveyor and the item goes to sinks.
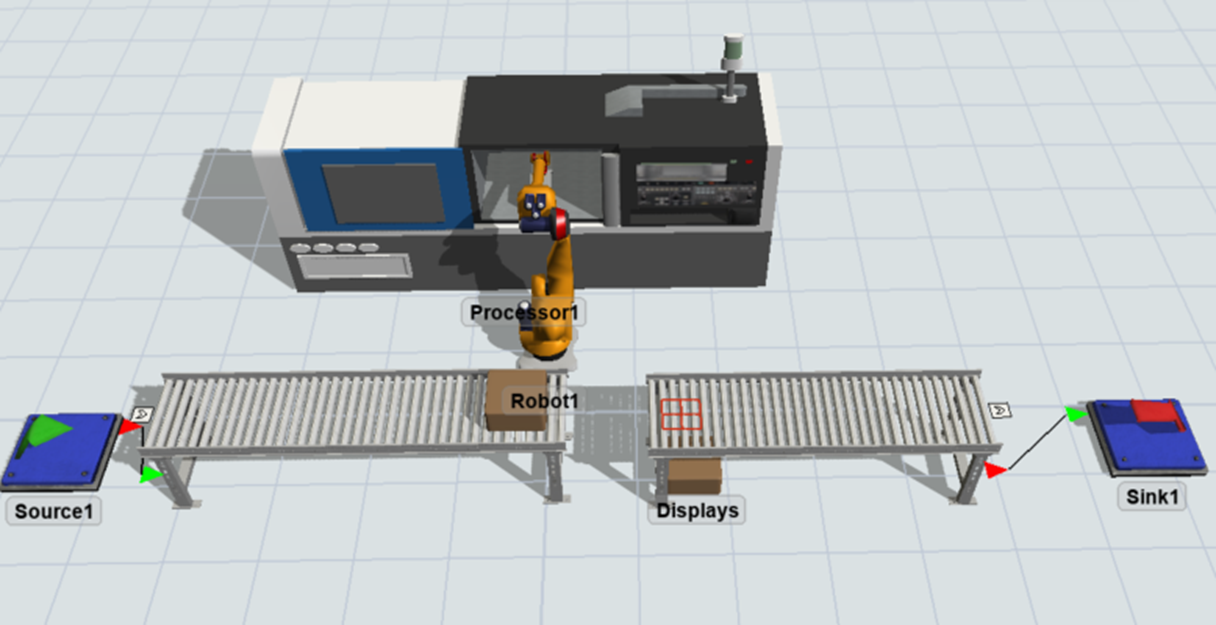
When I build the simulation, the Phase 1 is good. The issue occurred in Phase 2, the item now appears under the conveyor, and the robot is stuck in the processor. (Picture)
I am trying to use Robot Motion Paths to do all the work.
What should I do to correct the simulation run like the process I want? Thank you.
Here is my model: robot simple simulation_ver2.fsm
P.S. 1: It seems like when I put the station mark on the conveyor, it makes the item not move, the item is placed under the conveyor. What should I do if I like to place the item in another position on the output conveyor?
