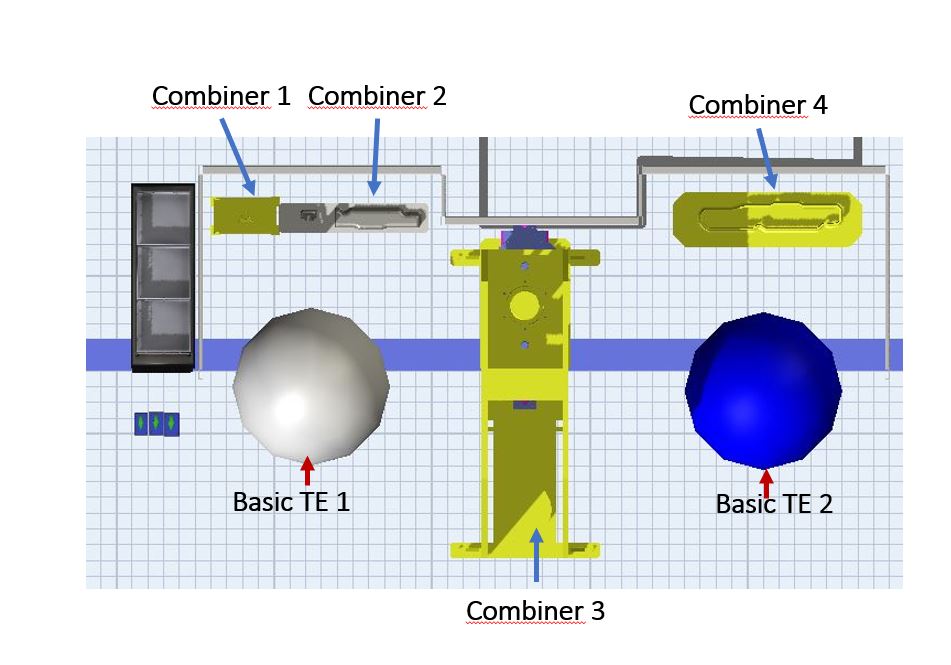
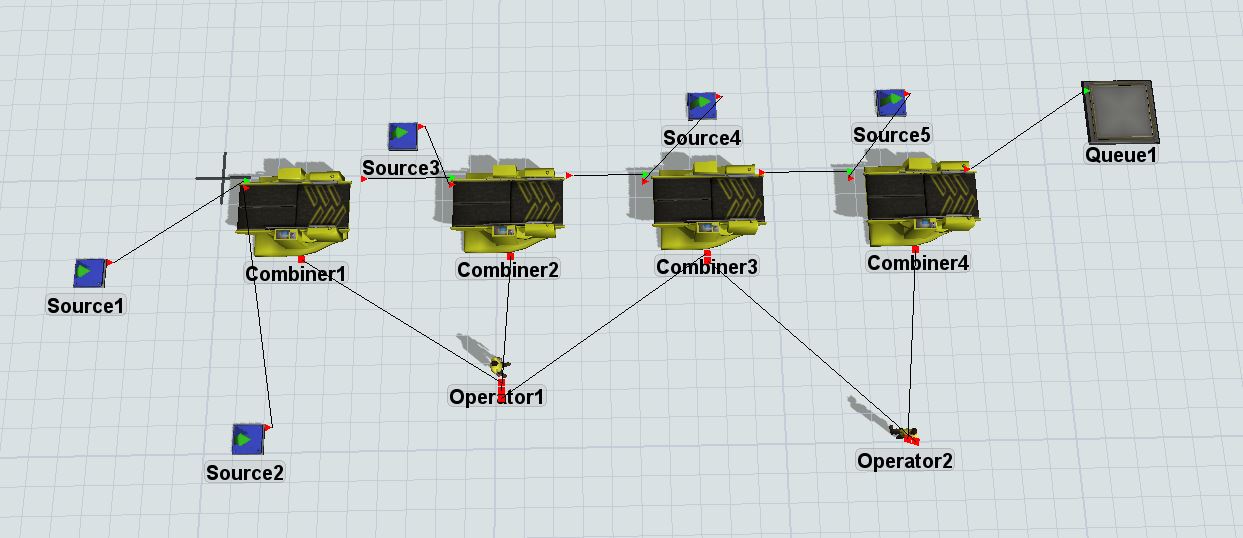
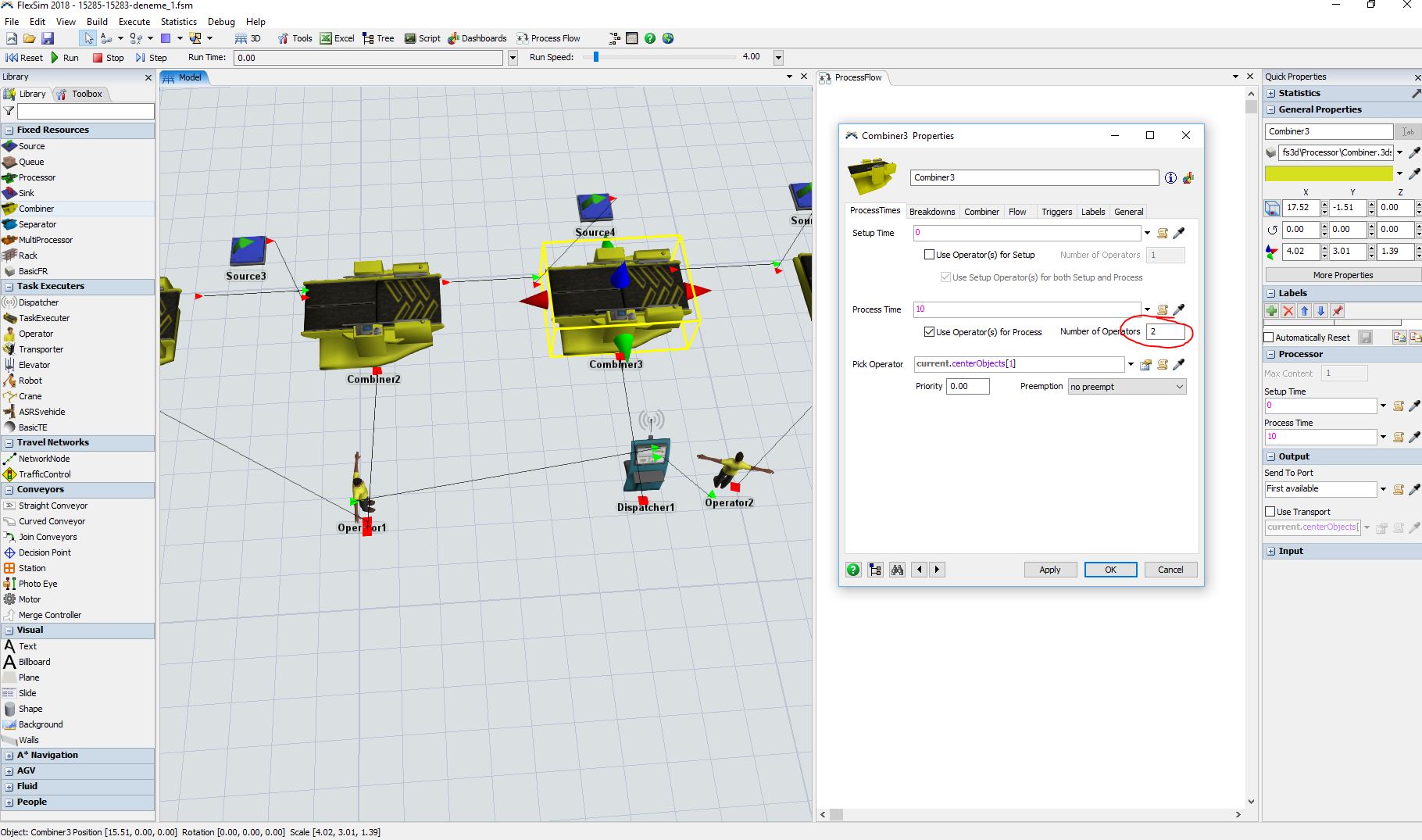
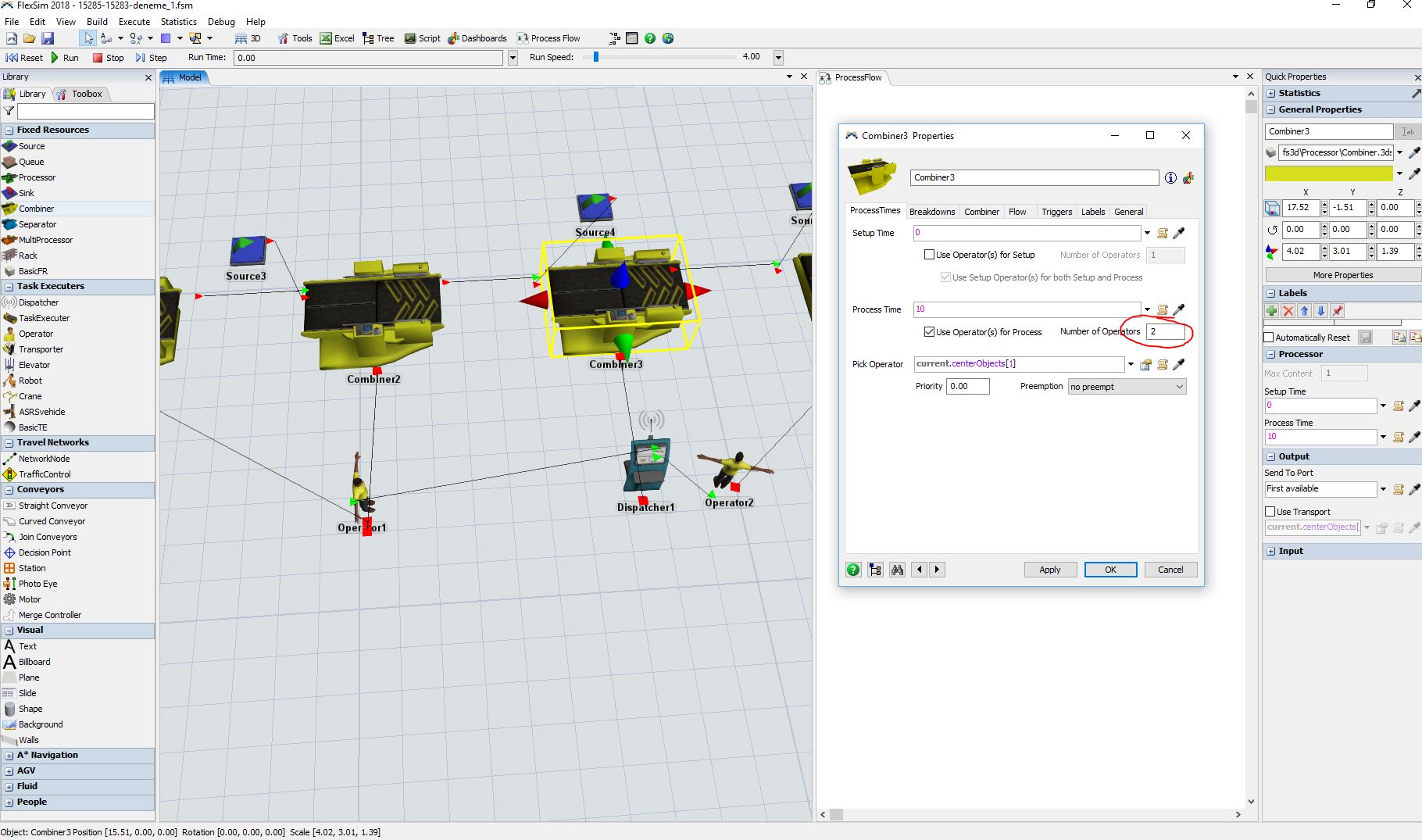
I have 4 combiners and 2 basic task executors as robot. I wanna to use these executors like that when combiner 1,combiner 2 and combiner 4 are processing,TE1 will interest in combiner 1 and combiner 2, TE2 will interest in combiner 4. When these proseses are finish TE 1 and TE 2 will interest in combiner 3 together. How can solve this situation ? Thanks for your attention.

{kind=link}