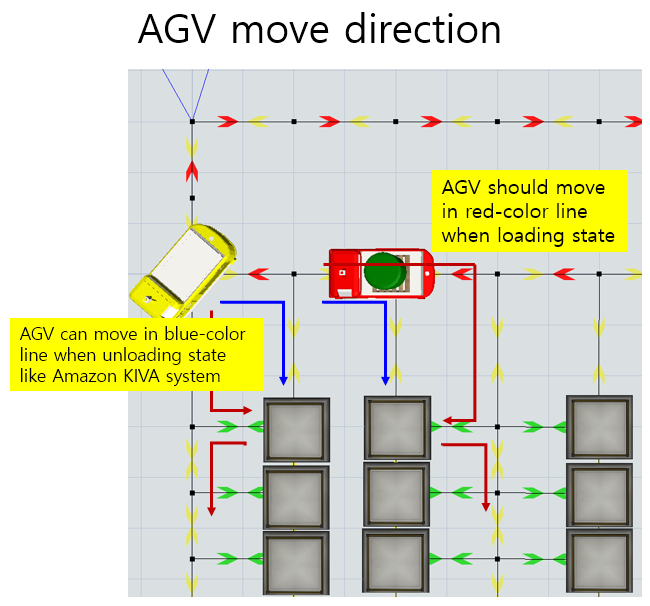
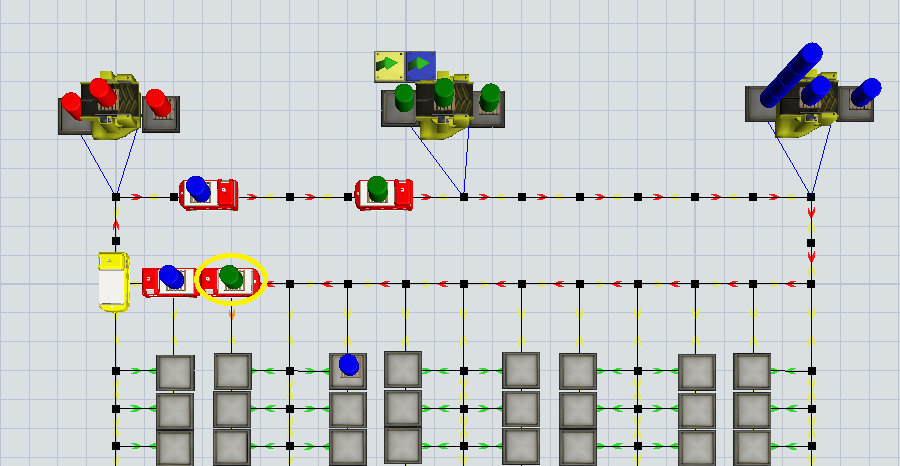
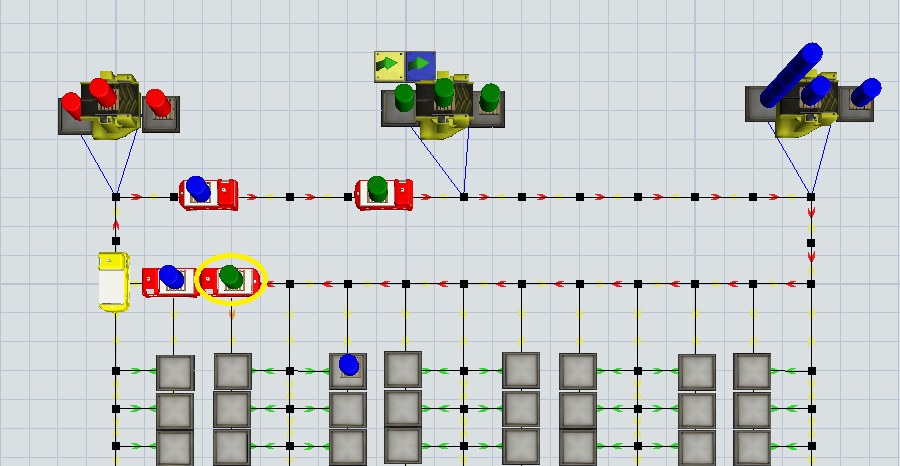
I want to control the AGV route dynamically according to the loading or unloading status of the AGV like Amazon KIVA system. So I made some script in the networknodes like attached captures.
Though closing the edge of 'To node', the AGV try to go the edge and as the result AGV do not move.
How can be controlled the AGV moving?
{kind=link}
{kind=link}