Hi there,
I have a few questions with regards to my model:
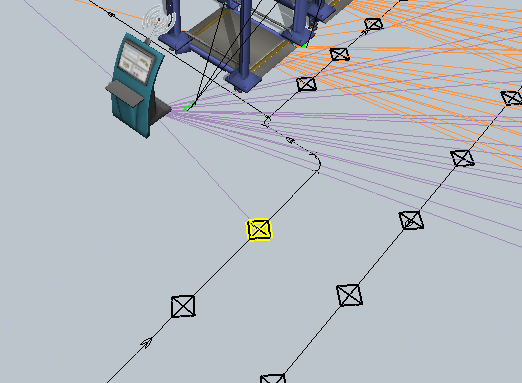
1. Why does the AGV only collect at one control point when I set up 5 points?
2. Why is the AGV not using the elevator?
Any help is appreciated. Thank you!
Hi there,
I have a few questions with regards to my model:
1. Why does the AGV only collect at one control point when I set up 5 points?
2. Why is the AGV not using the elevator?
Any help is appreciated. Thank you!
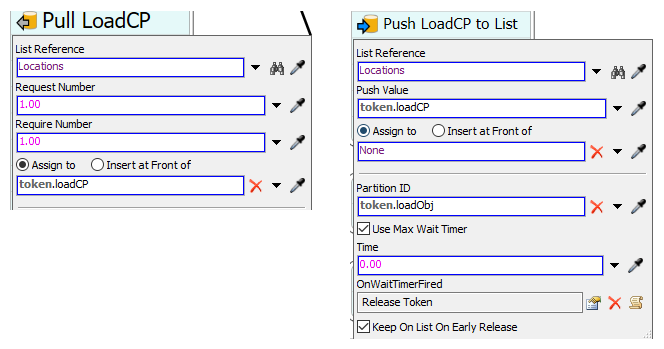
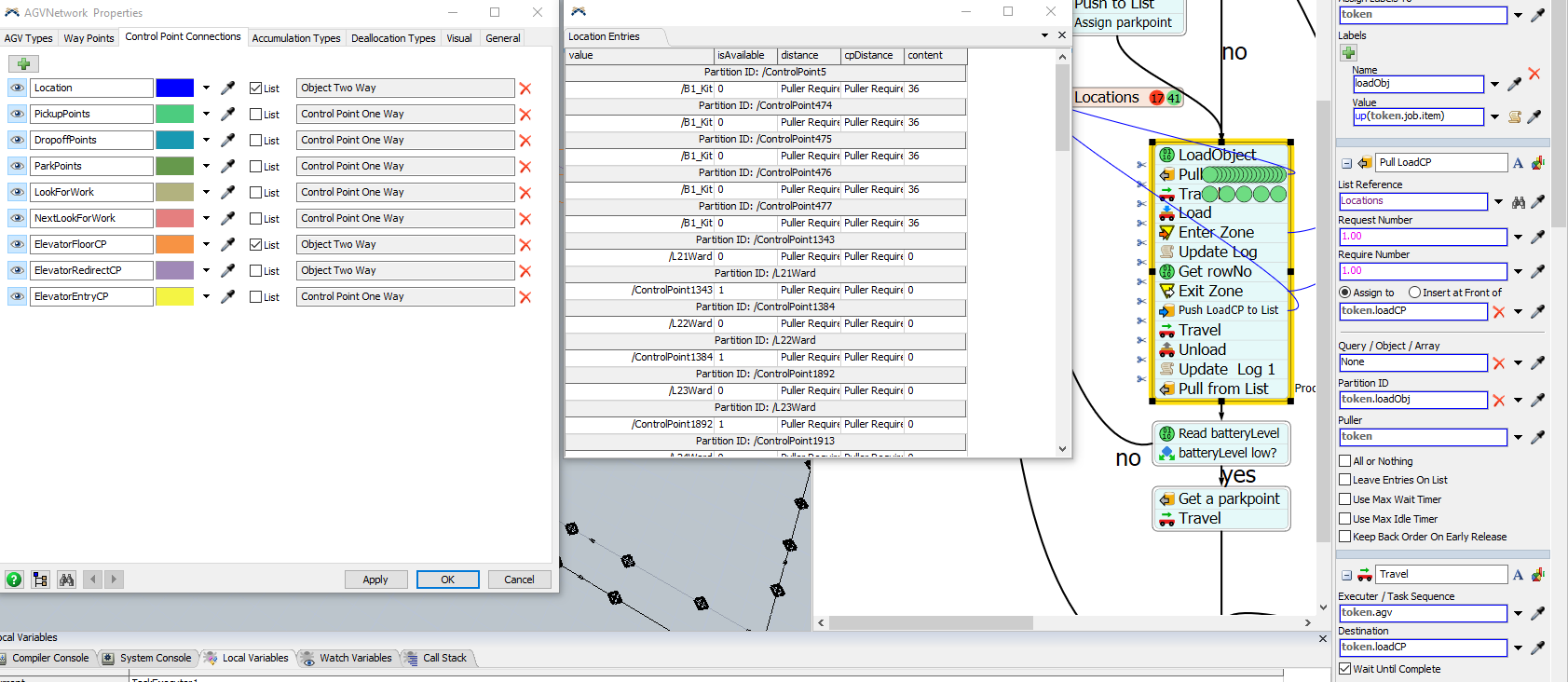
1) The AGVs will always travel to the closest CP that is connected to their destination object by default. You can use the "Location" list to have the AGVs pull one of the available points and then travel there.
2) I assume you mean the second AGV, that is waiting for the first elevator to finish? When the AGV arrives at the redirect control point, the next point on its route is the floorCP of the destination floor. Since the redirectCP is set to "Deallocate At Next Control Point", the AGV first has to arrive at the other floor before the point is deallocated and the next AGV can continue to it.
Either change the setting to "Deallocate When Past Current" or move the path connecting to the other floor to be behing the elevators, so the "Next Control Point" will always be the first elevator control point.
3 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.