Hello Everyone,
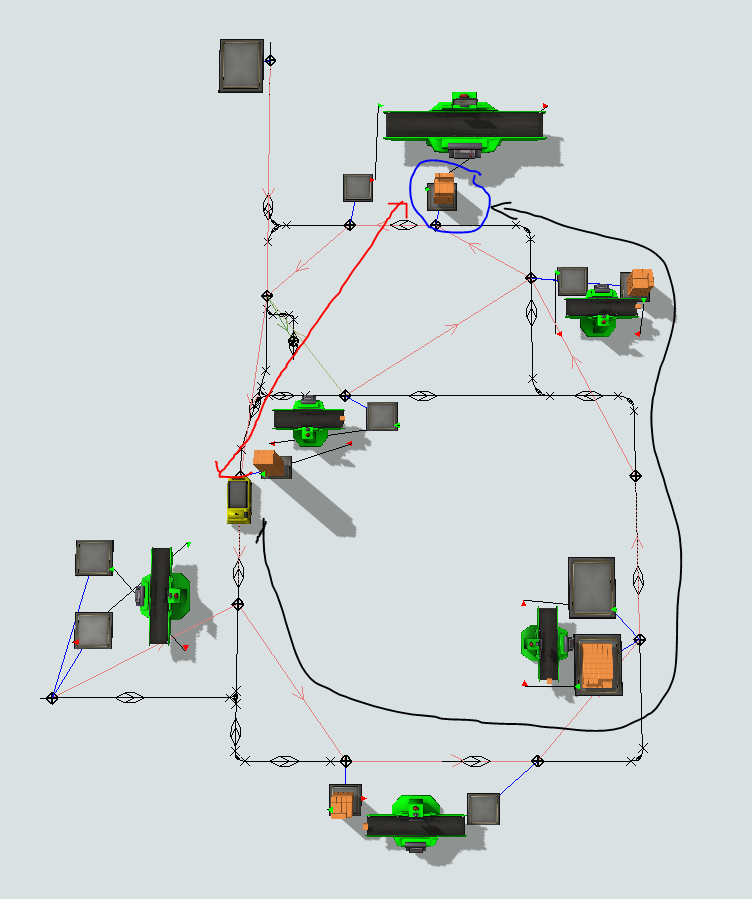
When there are no objects to pick up or drop off, the AGV continues to loop or travel in search of work. This is a problem that I'm attempting to fix. As tracking the empty travel metric has been restricted due to the AGV's looping/unnecessary travel. Therefore, the dash board's pie chart indicates that the vehicle is moving more than 50 KM (or 50000m) every day, which isn't practical. So it may be somewhat realistic if the AGV Empty travel is simply for collecting or returning to its park position.
How can the problem of unnecessary travel, job searching, or looping be resolved when there is nothing to pick up or leave off?
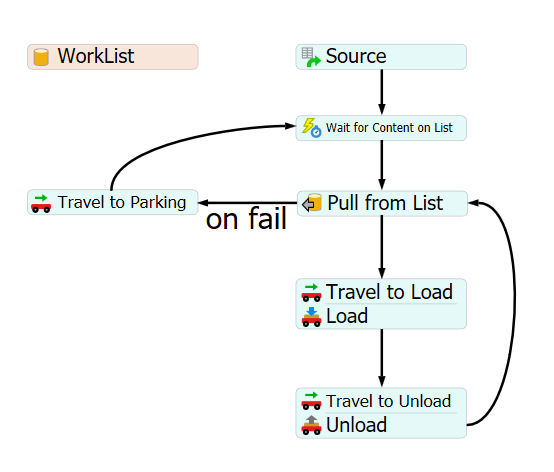
I am using standard AGV process flow template to instruct AGV to pick or drop items.
Any Suggestion or help?