Hello!
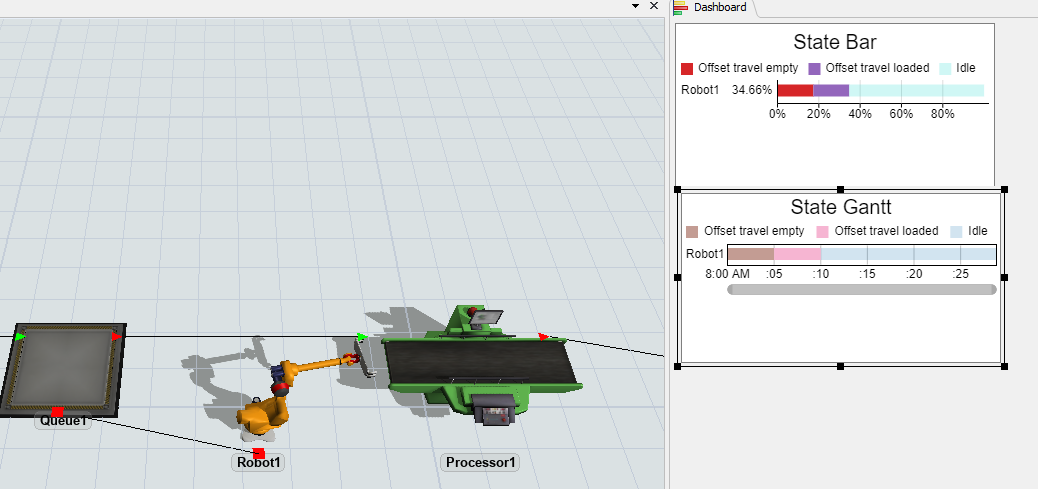
By default, the robot task executor shows idle state when there is no object available in a queue OR object is available in a queue but Robot can not process further since processor is still processing.
How would I separate above mention cases as below?

Scenario 1 and 4 are being tracked as normal. But I want help in scenario 2 and 3.