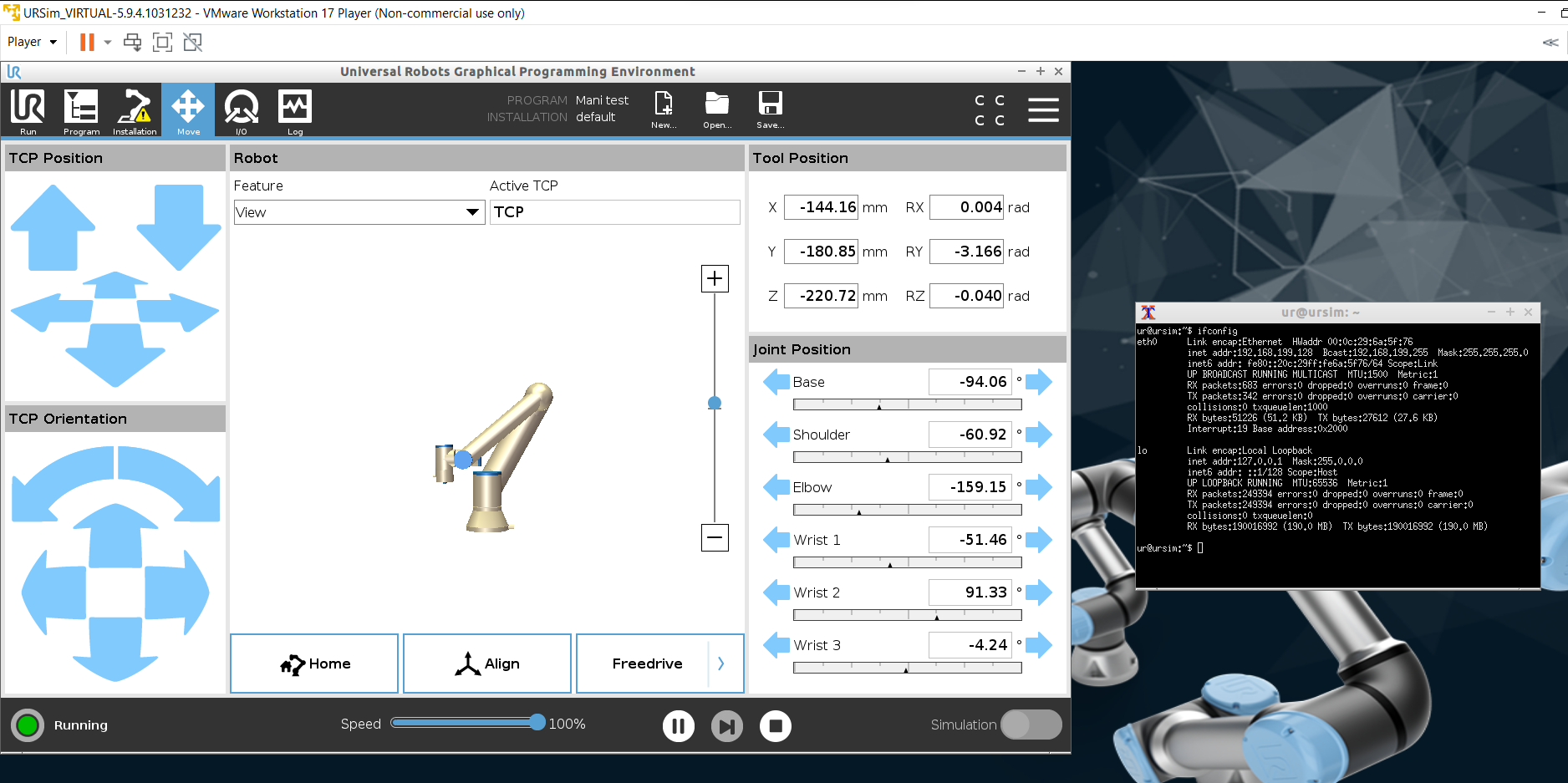
I am trying to get a data from a universal robot in URsim environment. I found the address of the robot to be connected. and connected according to the steps https://www.universal-robots.com/articles/ur/interface-communication/connecting-to-client-interfaces-within-ursim/#:~:text=Within%20the%20virtual%20machine%20open,of%20the%20robot%20within%20URSim.

I am trying to get the joints data of the robot while it is running into flexsim using Modbus connection

According to universal robot website https://www.universal-robots.com/articles/ur/interface-communication/modbus-server/

address (registers 270 to 275 gives a joint data of the robot)
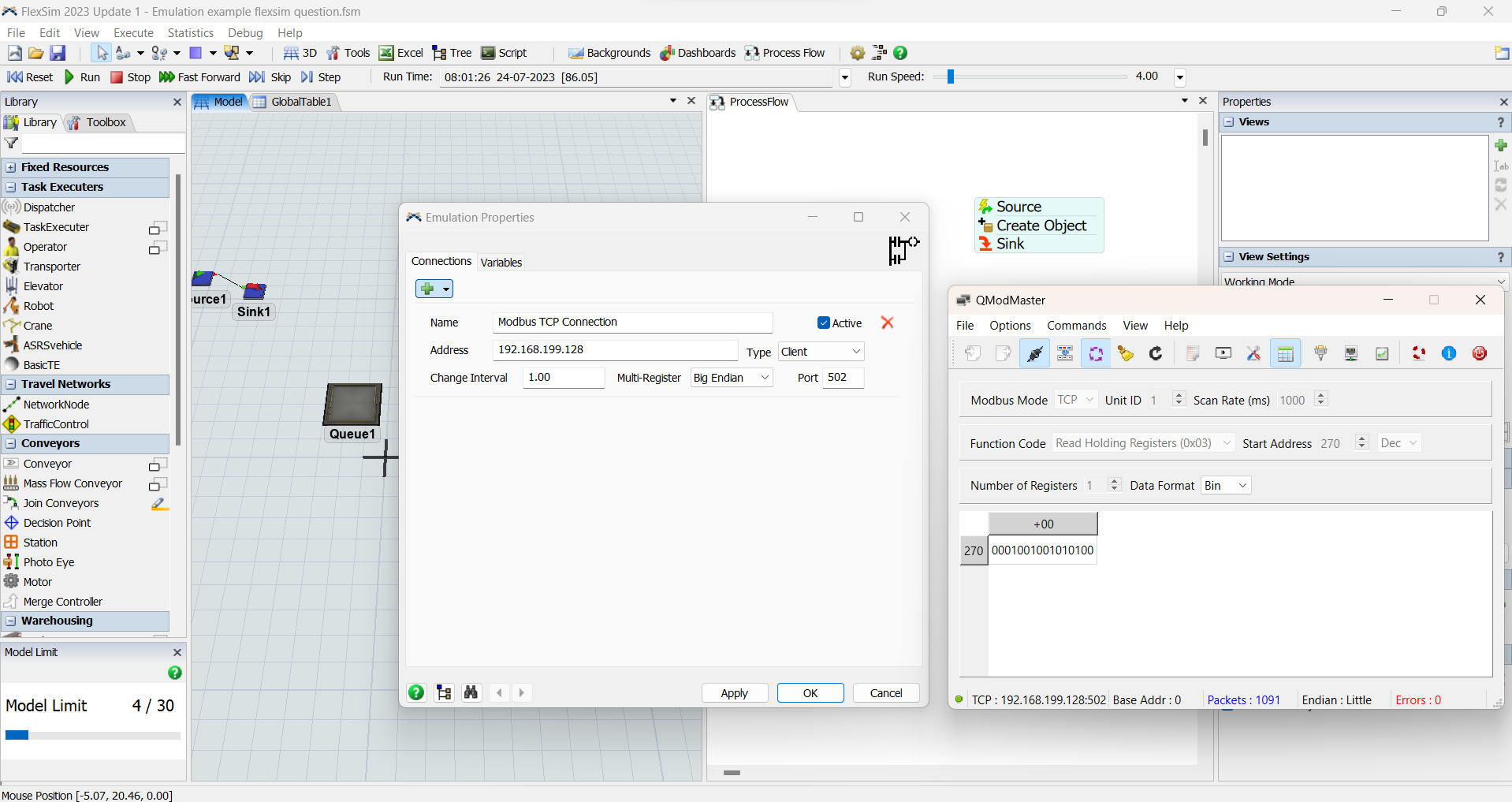
In flexsim I emulated the connection as

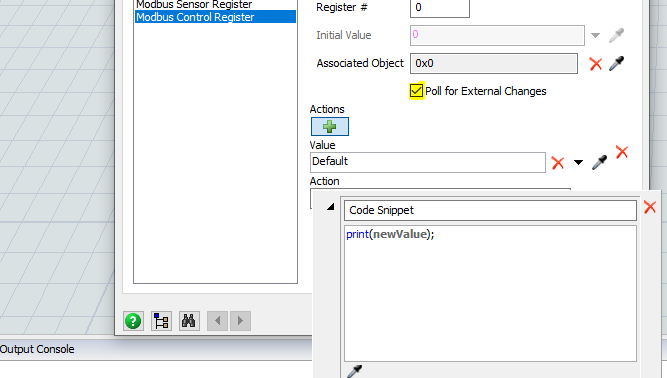
detailed model Emulation example flexsim question.fsm here i am basically testing whenever a data comes from the register create a object on queue / change the colour of the queue using control registers. But when i run the model no change in the property of queue.
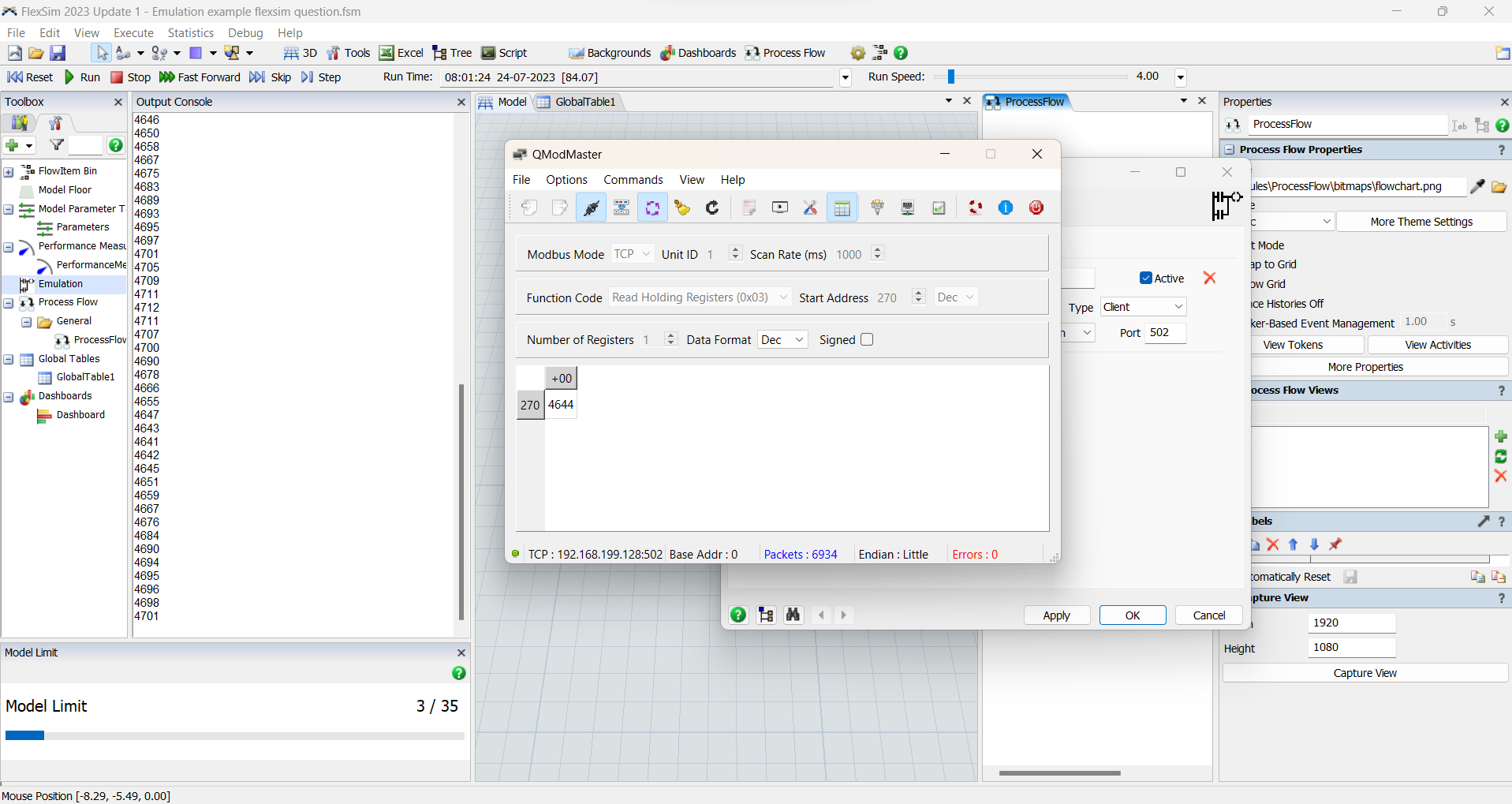
I doubted whether the connection is good and checked with qModMaster https://sourceforge.net/projects/qmodmaster/
It seems i am getting data from the URsim robot for the Base joint which is in 270 register. But it is not reflecting in the flexsim model.
How do i check whether flexsim is receiving data from the address by using MODBUS TCP connection. Is there anything I could do alternatively in the model like populating the data in global table. Help me in this regard so that I could get data from the robot.