Dear FlexSim Community,
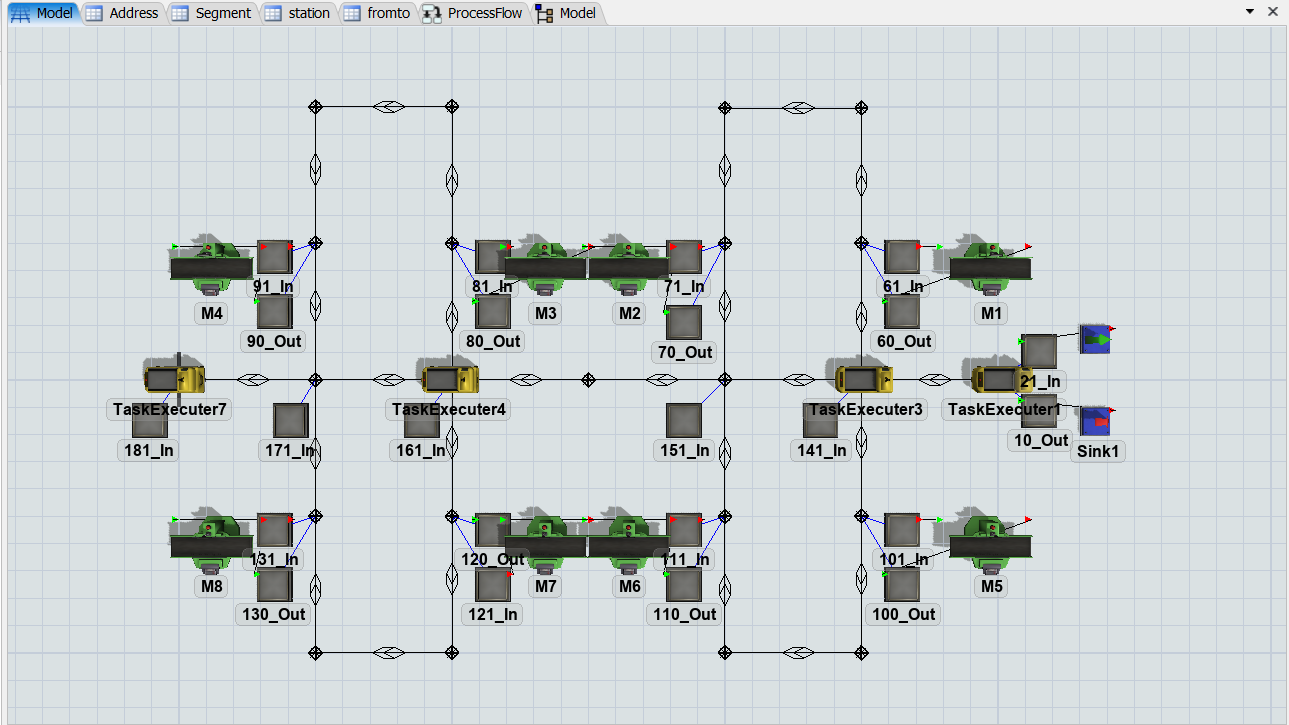
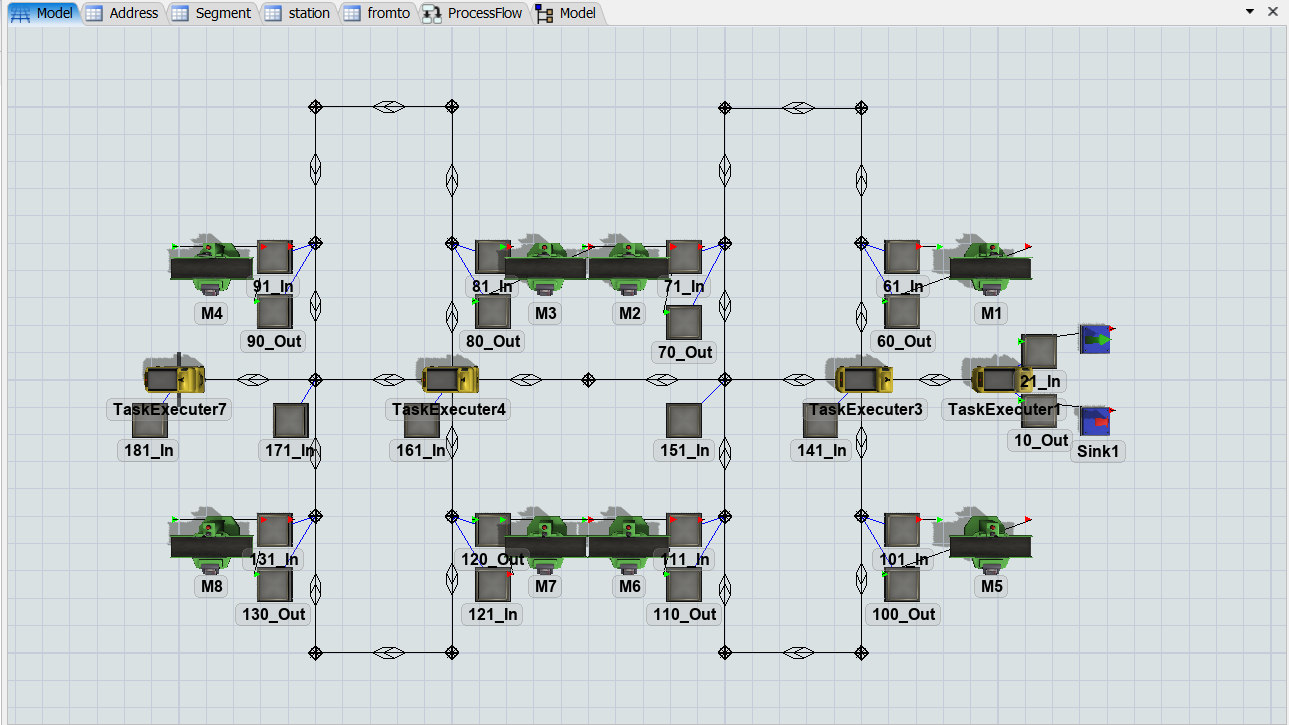
As you can see, I am trying to use this layout to perform material transportation tasks.
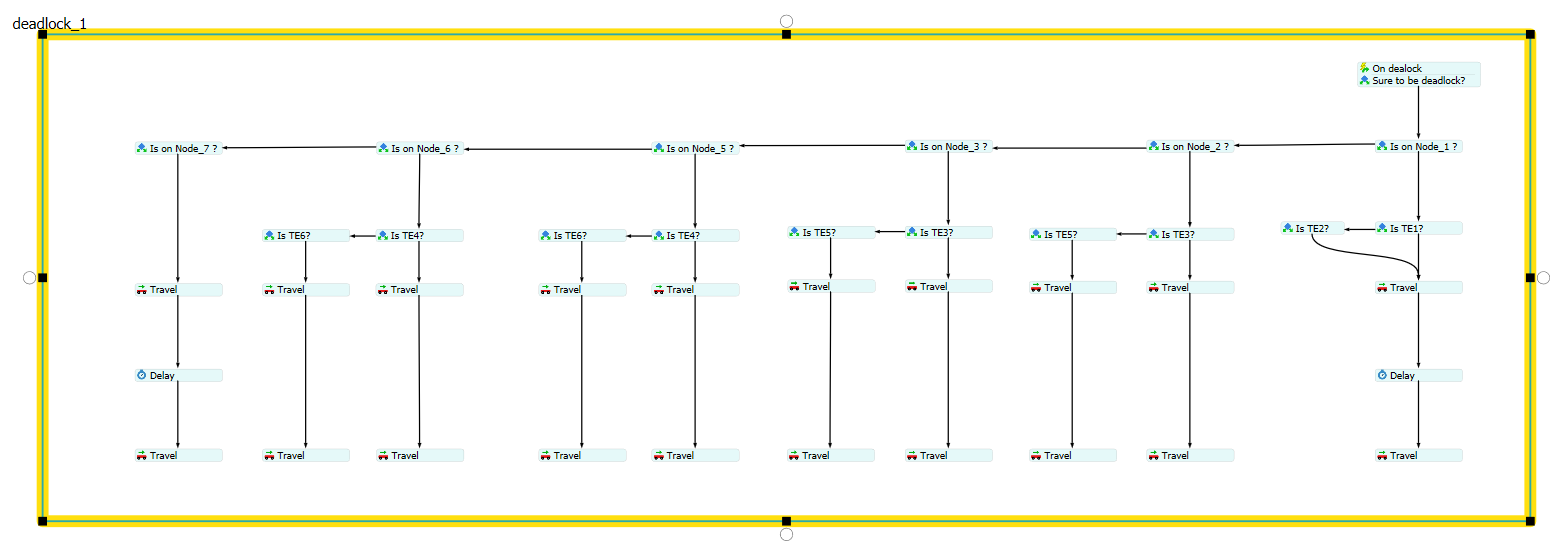
My idea is that if one of the AGVs causes a deadlock at an intersection, first determine which intersection it is at, and then determine which AGV it is. After determining which AGV it is, move it away first, stop for 5 seconds, and then let the AGV return to its original position.
The traffic avoidance logic at the intersection is as follows:
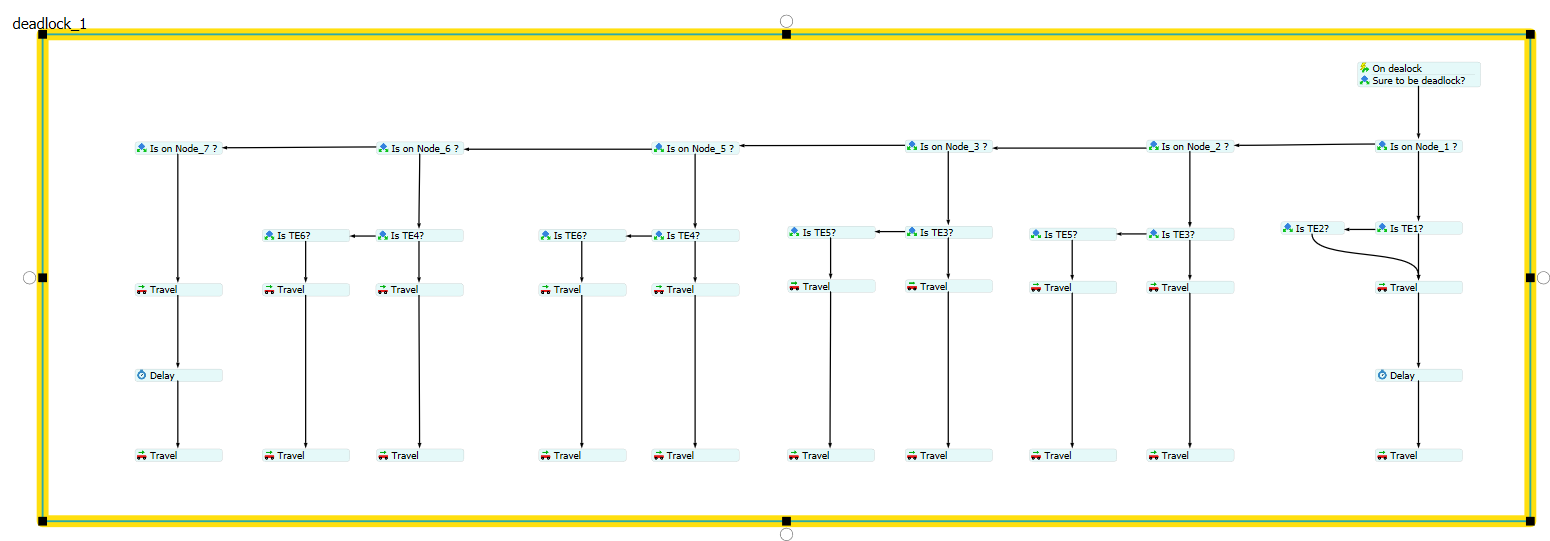
I want the AGV to return to where it was originally expected to go after turning, but the token generated by my newly created Event-Triggered Source (On deadlock) is different from the original token, so I don’t know how to make the AGV execute the original itinerary.
If I don't solve this problem, there will always be a deadlock situation.
Can anyone help figure out the error?

{kind=link}
{kind=link}