I was wondering if you could help me out here I’m looking at these scope of operation.
SEQUENCE OF OPERATIONS
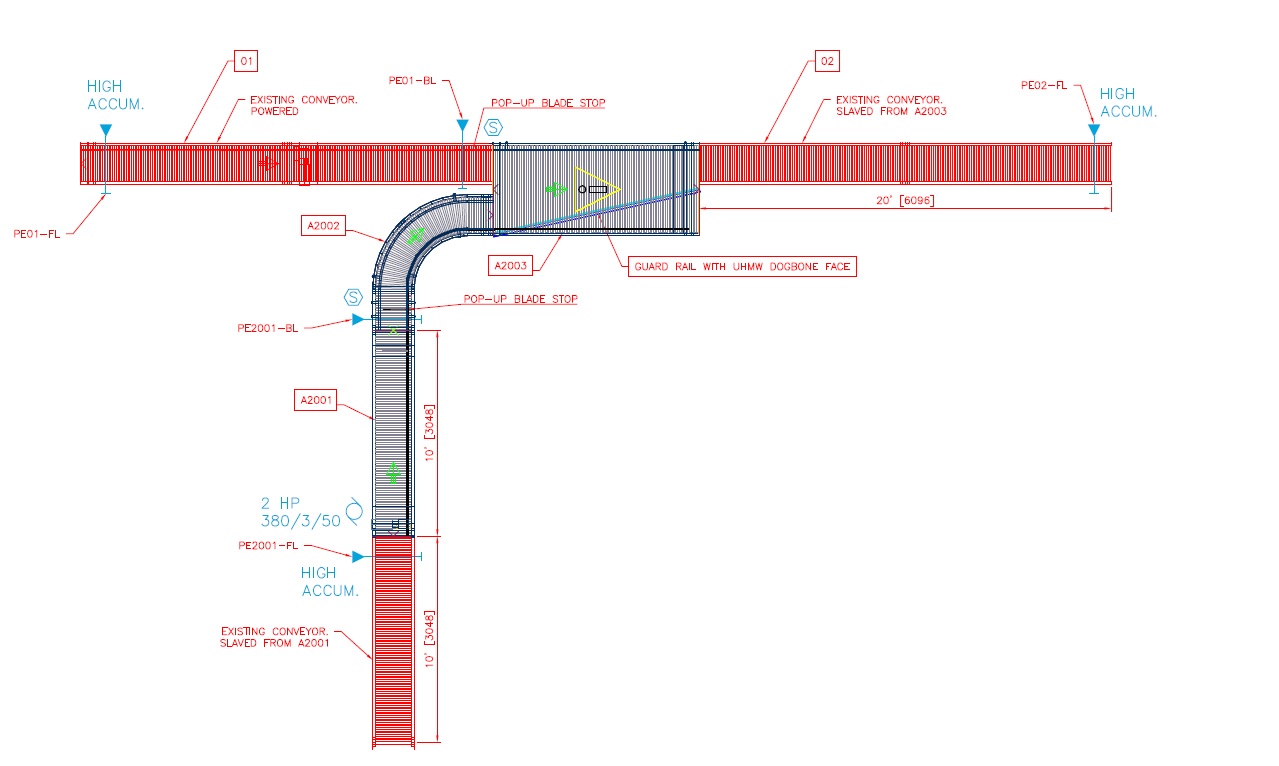
The system consists in two conveyor lanes that merge into one. The conveyor lane A2001 will have a higher rate, so that it will have priority at the merge. In normal conditions the boxes on conveyor A2001 will be passing through the merge conveyor A2003 and the boxes on conveyor 01 will be stopped right before the merge. When a pre-determined number of boxes are accumulated on conveyor 01 (defined by the location of photo-eye PE01-FL), the boxes on conveyor A2001 will be stopped before the merge and the boxes on conveyor 01 will be released. When all the boxes that were accumulated on conveyor 01 have passed, the new incoming boxes will be stopped and the boxes on conveyor A2001 will be released, resuming the normal conditions.
When the boxes on conveyor 01 are being released, if there is a number of boxes traveling back-to-back (no gap between them) enough to cause to accumulate boxes on conveyor A2001 up to the photo-eye PE2001-FL, when that photo-eye detects the accumulation, the motor of conveyor 01 will be stopped and –after a delay- the boxes on conveyor A2001 will be released. When all the boxes that were accumulated on conveyor A2001 have passed, the new incoming boxes will be stopped and the motor of conveyor 01 will be started again, returning to the previous condition.
When the photo-eye PE02-FL detects accumulation or a “jam”, the motors on conveyors 01, 02 and A2001 will be stopped and a Beacon Light will be turned ON, indicating that a jam has occurred. An operator will then need to clear the jam and press a “Reset” pushbutton, which will turn OFF the Beacon Light and will also turn ON the motors that were stopped, returning to the previous conditions.
conveyor.jpg......................................................................................................................................................
{kind=link}
I’m have trouble with making one of the conveyors have priority over the other. And I want it to release priority if a condition is met and take it back if another condition is met. Using just decision points and Photoeye at the moment but no luck.
If you would like to see more of the scope of operation let me know.
{kind=link}