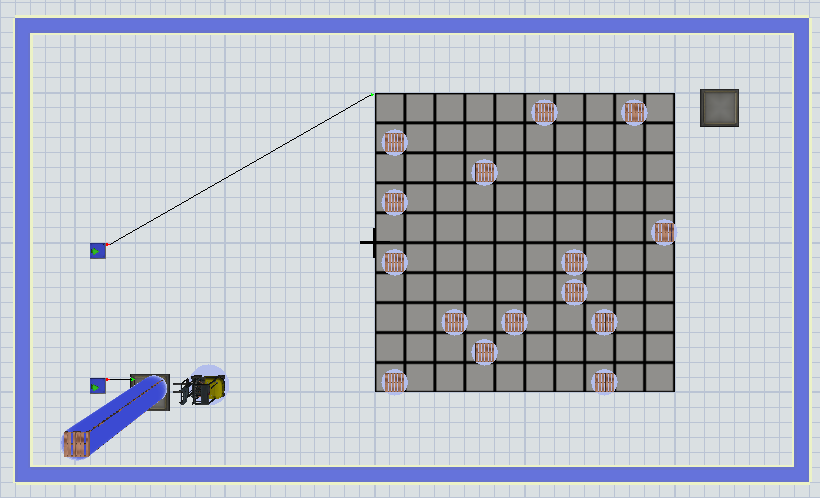
Hello! When starting the model boxes are created in the rack, and then placed in the model preserving its global position and then get its X and Y coordinates. When receiving pallets what I do is that a forklift go through them and put them in a position global according to the box. I'm trying to make this interact with the A * Navigator so that every time a pallet is placed on the floor, that area is limited so that the forklift can not pass through that area and look for a new route to the destination to which it should travel. I have done it in the following way, but it does not work, because when placing the pallets on the floor the A * Navigator does not detect them, and passes through them. Do you have a solution or can not this be done? If something is not clear please comment me and explain a little more.