Hi i am new to using flexsim. Currently i have experienced an Deadlock while running my simulation, however it seems like there can be other possible path as drawn using the red and blue marker in the picture shown, how do i change the setting and make the task executer smart enough to move through other paths?
I have attached the file and a screenshot of the model below
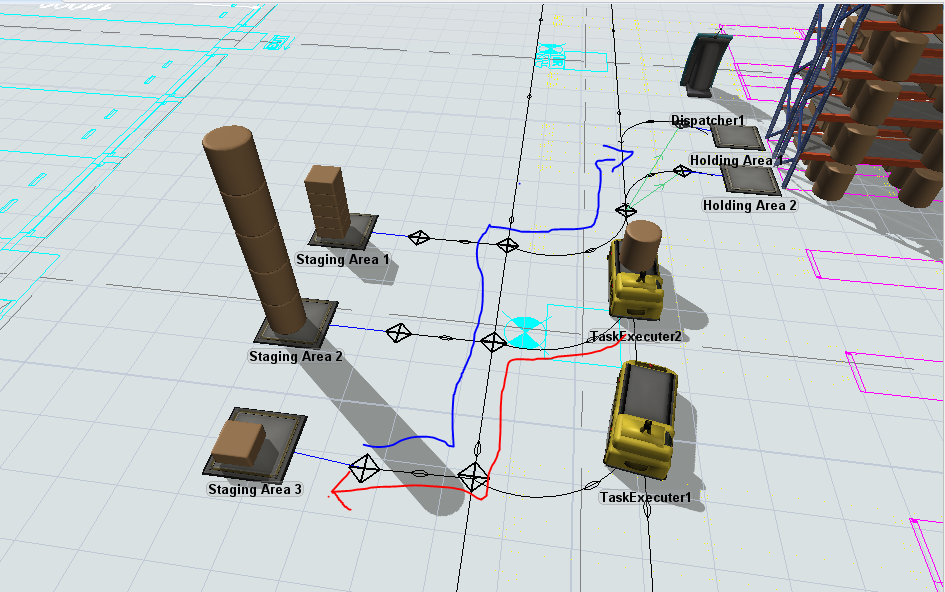
As seen in this picture, the taskexecuter2 could had use the red path OR the taskexecuter1 could have use the blue path

{kind=link}