I want agv to acquire control point to standby when no task to execute. Because there might be more than 1 decisions for AGV to choose from. I'd like to let agv go to nearest control point to standby. so maybe managing these control point is needed.
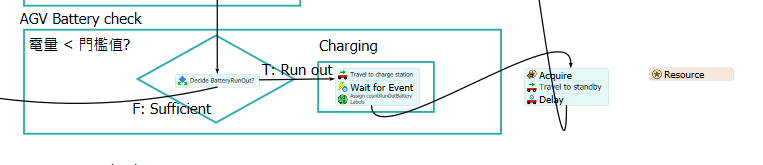
The standby process is right beside AGV Battery check process.
 My control point to standby is controlpoint48, controlpoint49, controlpoint50.
My control point to standby is controlpoint48, controlpoint49, controlpoint50.
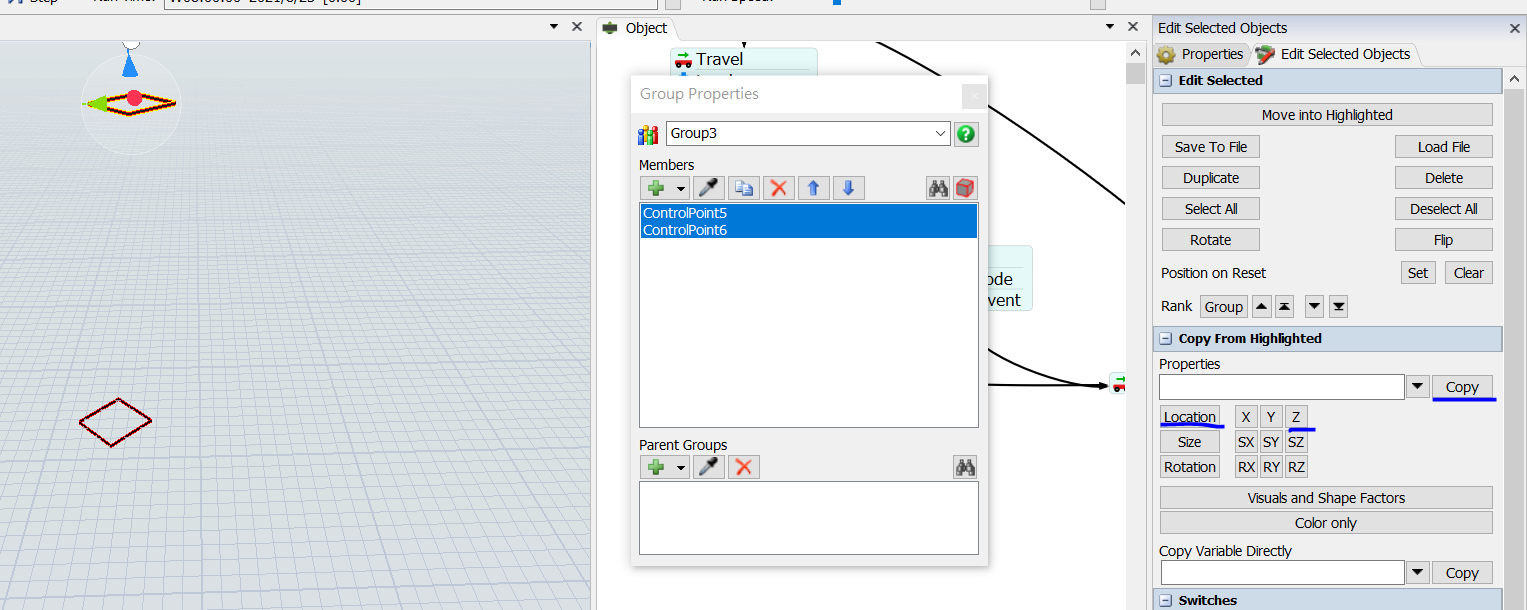
Also, is there any way to position whole AGV system(path, curve, controlpoints) heights at one time. Because the AGV system is traveling overhead, but I find path, curve and controlpoints couldn't be grouped, so I have to position each of them one by one.