Hi,
I'm trying to move the AGV to ControlPoint1 with the A* navigator in the following model, but it doesn't seem to move on the shortest path. I would expect the AGV to behave like when moving to ControlPoint2.
I have a few questions related to this.
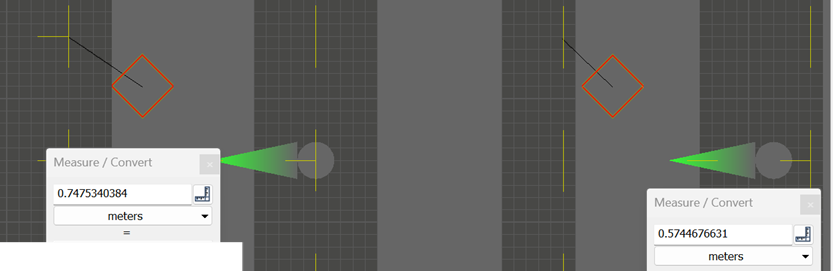
- Why travel threshold is different between ControlPoint1 and ControlPoint2?
- What is a good way to determine the Default Preferred Path Weight? The weight value of 0.4 gives the expected behavior for this model.
Thanks in advance.
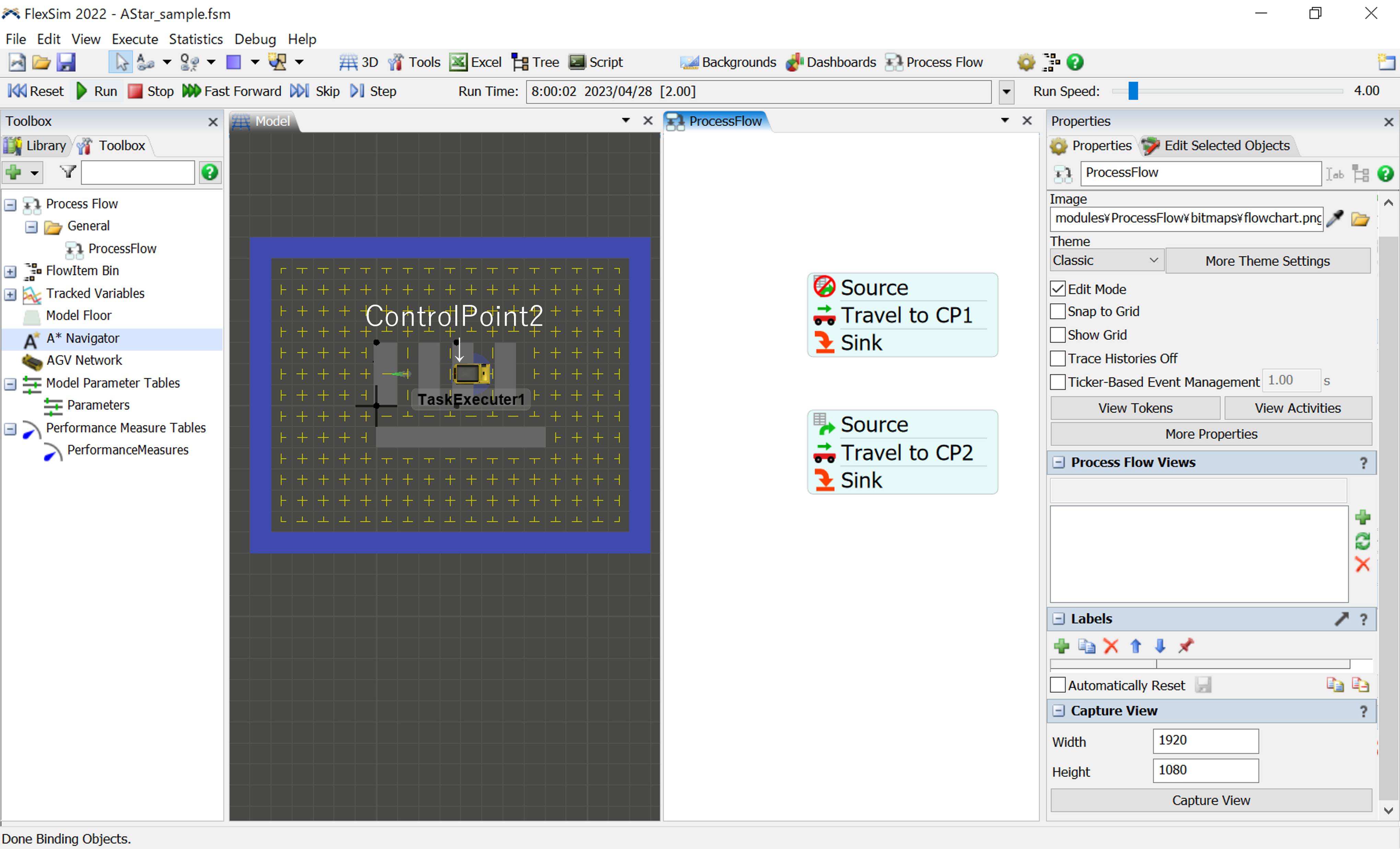
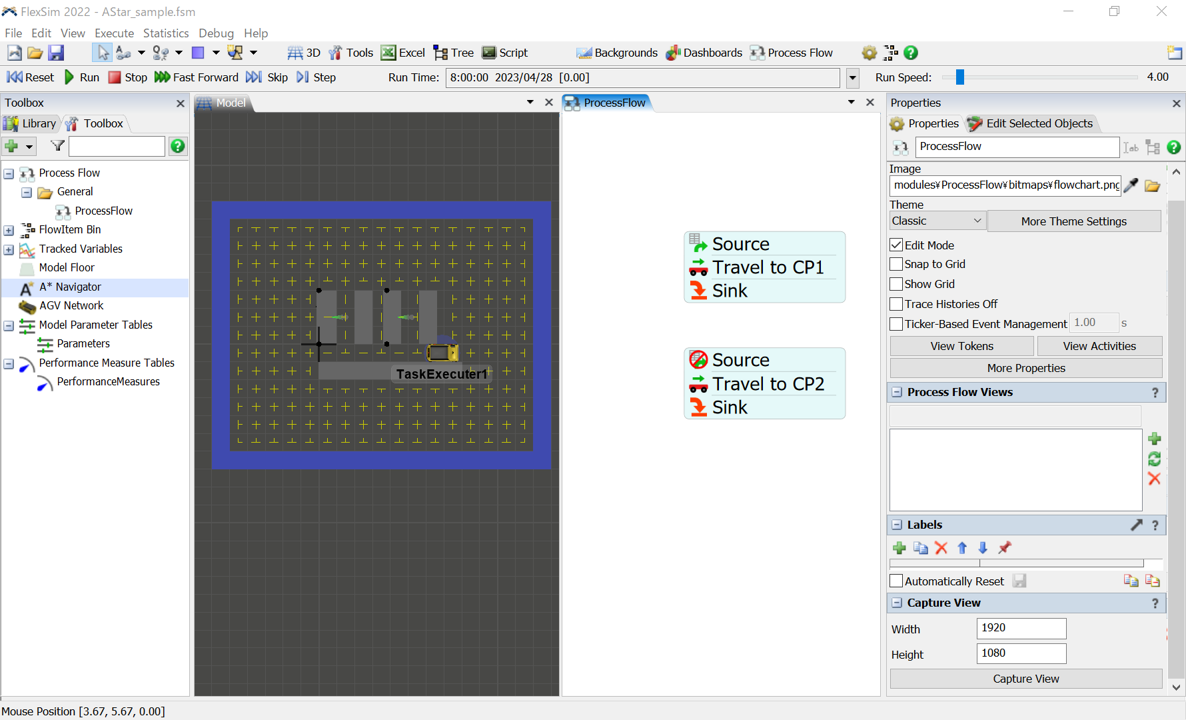
This is the picture of the initial state of this model:
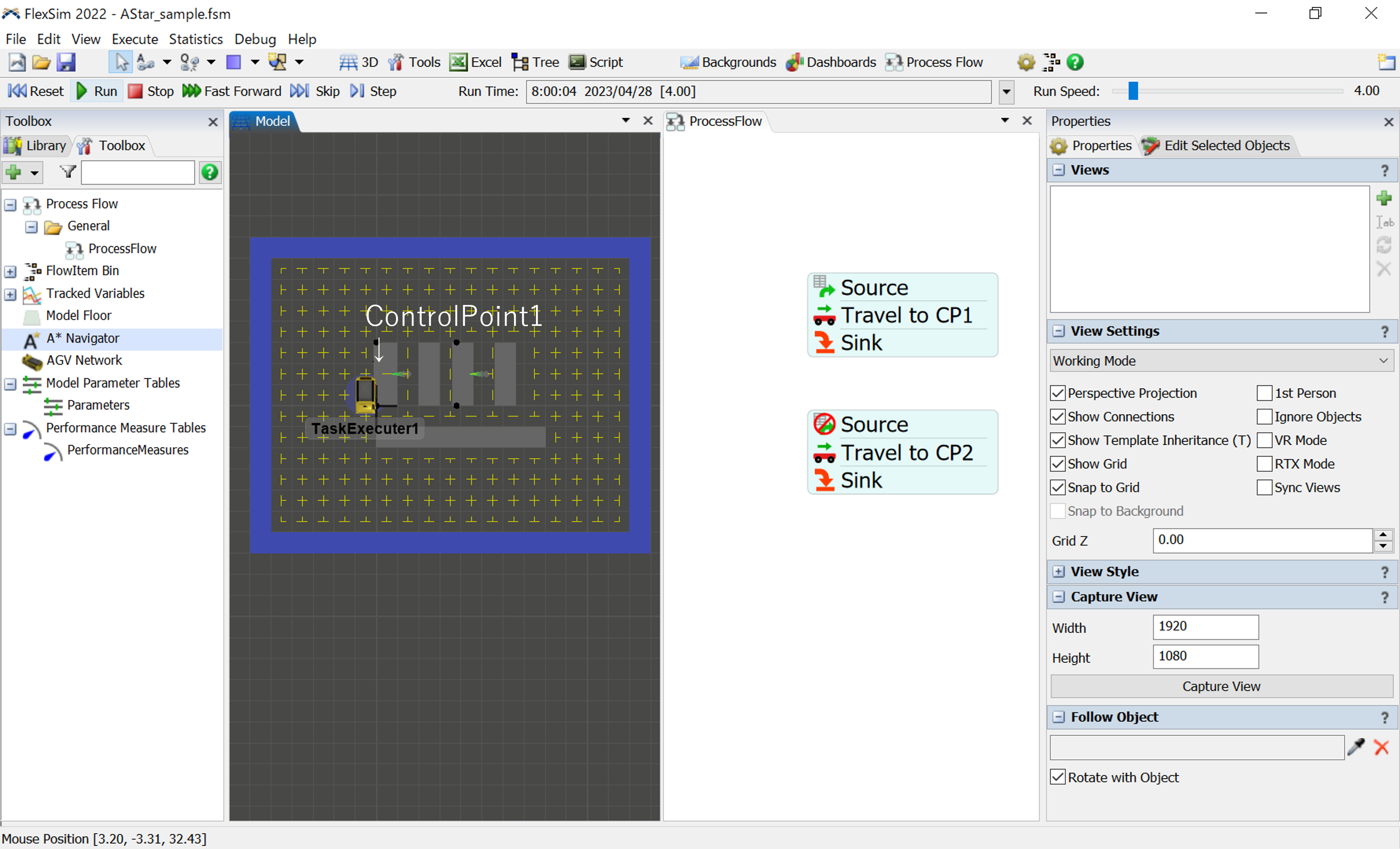
This is the picture after moving to CP1:
This is the picture after moving to CP2: