Hi,
Please check the attached model.
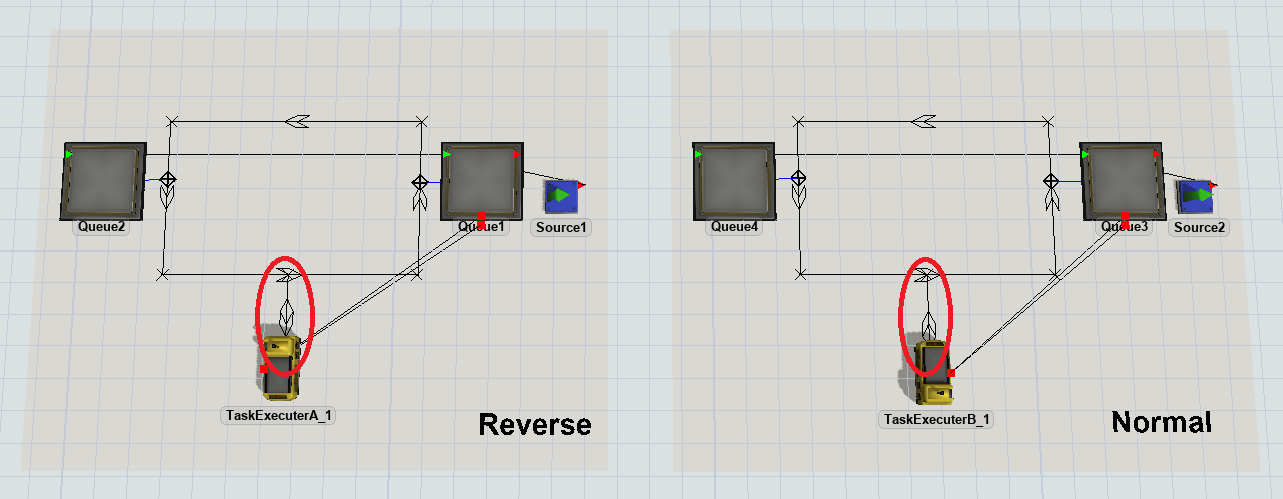
Both have the same basic layout, but the direction in which the red frame AGV path is created is different. If this path is set bidirectionally and a simulation is performed with two or more AGVs, the layout of the AGVs set in the opposite direction will become blocked and will not proceed.
Is this the spec?
