Hi,
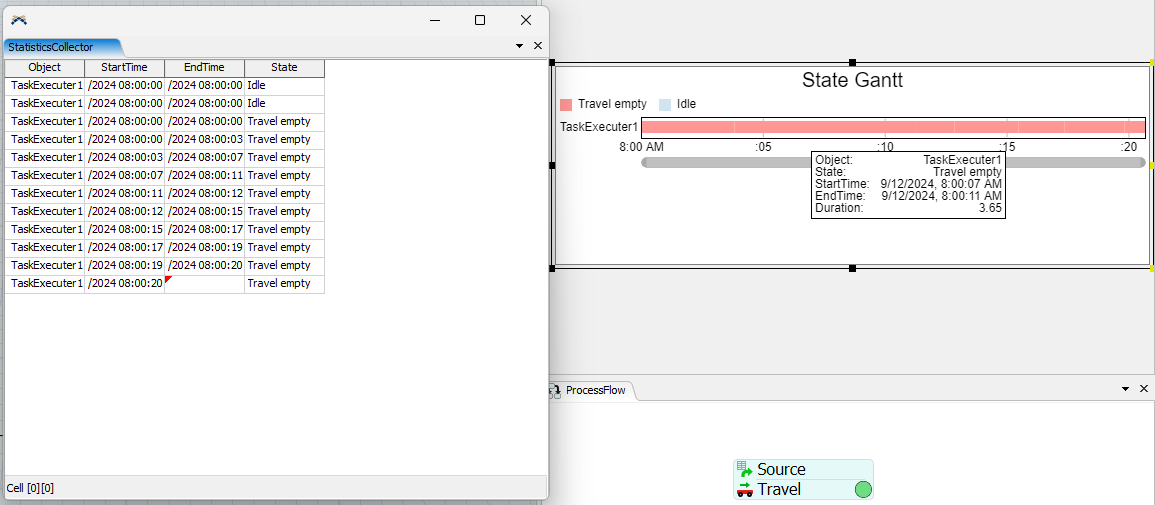
In the attached model you can the following situation, where the state is split in many small state blocks, instead of one big state block. This makes it hard to see how long the travel task actually took. I would hope to see just one big state block.
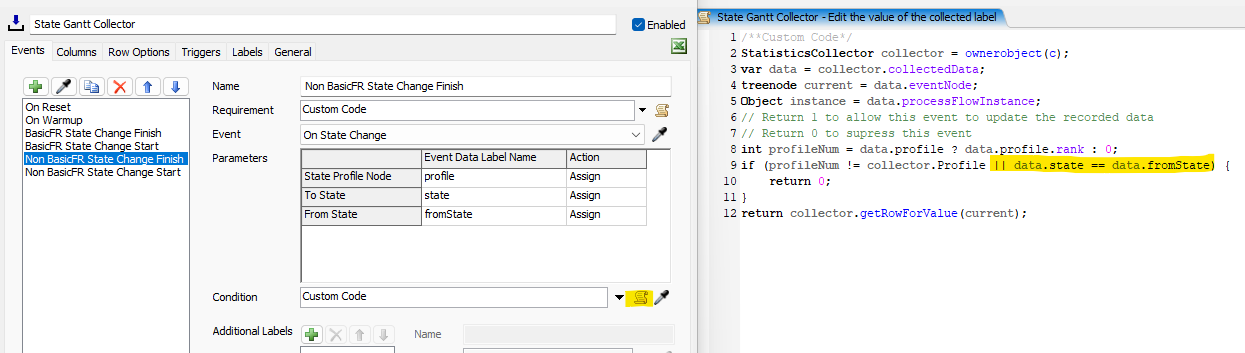
I guess the AGV network is setting the state at each control point, because the more control points we have the smaller the state blocks become.
Is this intentional behavior?
Thanks,
Patrick