Hello, I am trying to pick the inner container for the double deep layer. May I know how to make it? I want to call another robot to transport the rack at the front. This rack will be loaded by another robot and will be deliver to its original position by travelling 1 round path. So that the inner rack can be take out. But I don't know how to call another robot by a robot. Thank you.
AMR double deep task assignment
FlexSim 21.1.5
Hello
@Lam0012, I am not convinced, that in reality an involved robot is calling another robot to assist him. I think it is more a control unit that manages both robots, because how should a plc know that a product is blocked by another product. This said, you will dispatch first a tasksequence to redirect the blocking product and simultaneously a tasksequence to let wait a second robot in near distance. When blocking product is away, you let a waiting robot finishing his transport job.
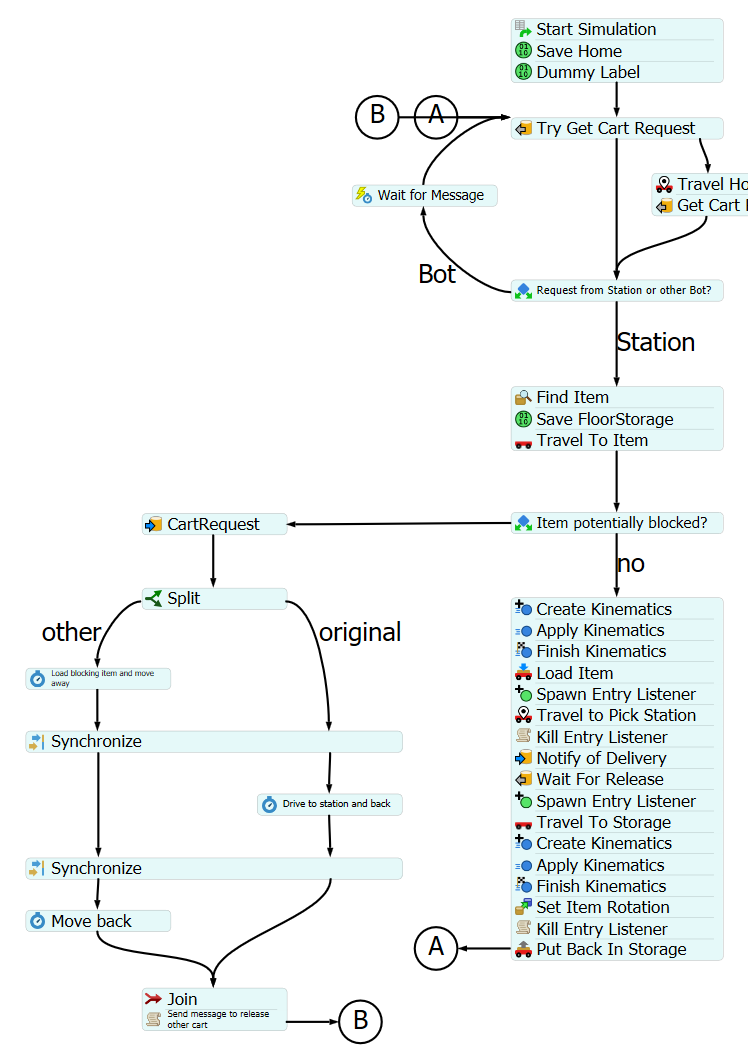
To "acquire" a second robot you can utilize the same structure that the stations use: The first robot's token pushes itself to the cart request list so it can be pulled by another available cart. You just need to differentiate between the cases of the cart pulling a station's token or a robot's token. This could be done by using a shared label with different values that identify the token as either belonging to a station of a robot.
If a robot's token is pulled, the pulling token doesn't initiate any actions by itself but simply waits until the other token (the one of the first robot) is done with the synchronized sequence of tasks. The attached model contains an example of this. (The case of acquiring a second robot only keeps the robots occupied for some time without actually doing anything. The model is only meant to demonstrate how to use a second robot)
Other things you will have to think about to get the process to work:
- How to identify if the item is placed in a middle slot that might be blocked (the attached model uses slot labels for this)
- How to check whether the item is actually blocked
- Possibly by keeping a reference of each neighbouring slot for the middle slots
- How to determine where the second robot is taking the blocking item (easiert solution might be temporary waiting spots at the side of the grid, so they can't block other robots while they wait for the actual request to be fulfilled)
Thank you for your help. But I still cannot fix the problem that you have mentioned.
I updated the model to also contain an example of how to check if a slot is actually blocked or not. The code in the script window is executed once at the start of the simulation (see top left corner of AMR Process Flow). It writes references to the two neighbouring slots onto labels for each middle slot (slots where the "TwoDeep" label is 1).
These references are then used to check if the neighbouring slots contain items in the Decide activity marked orange.
Hello,
I am trying to modify my model to use data coming from an Excel file. The file contains columns for OrderID, OrderLine, SKU, Quantity, and Time. I have already created a Global Table in FlexSim named OrderTable for this Excel file and added a Scheduled Source to generate orders. However, the process is not straightforward, and I need some guidance. Also, How I can Attribute an initial inventory to carts in the model and visually display the parts/items stored in these carts.
How I can Include charge stations for robots and integrate them into the workflow.
I would appreciate any detailed instructions or examples you can provide to help me implement these features.
Thank you in advance for your help!
Best regards
14 People are following this question.