When using the AGV module, if an origin control point is placed at the end of a straight line path just before a curved path (that is at the intersection of a straight line and curved paths), then the AGV network can't find the route.
Navigation Error:
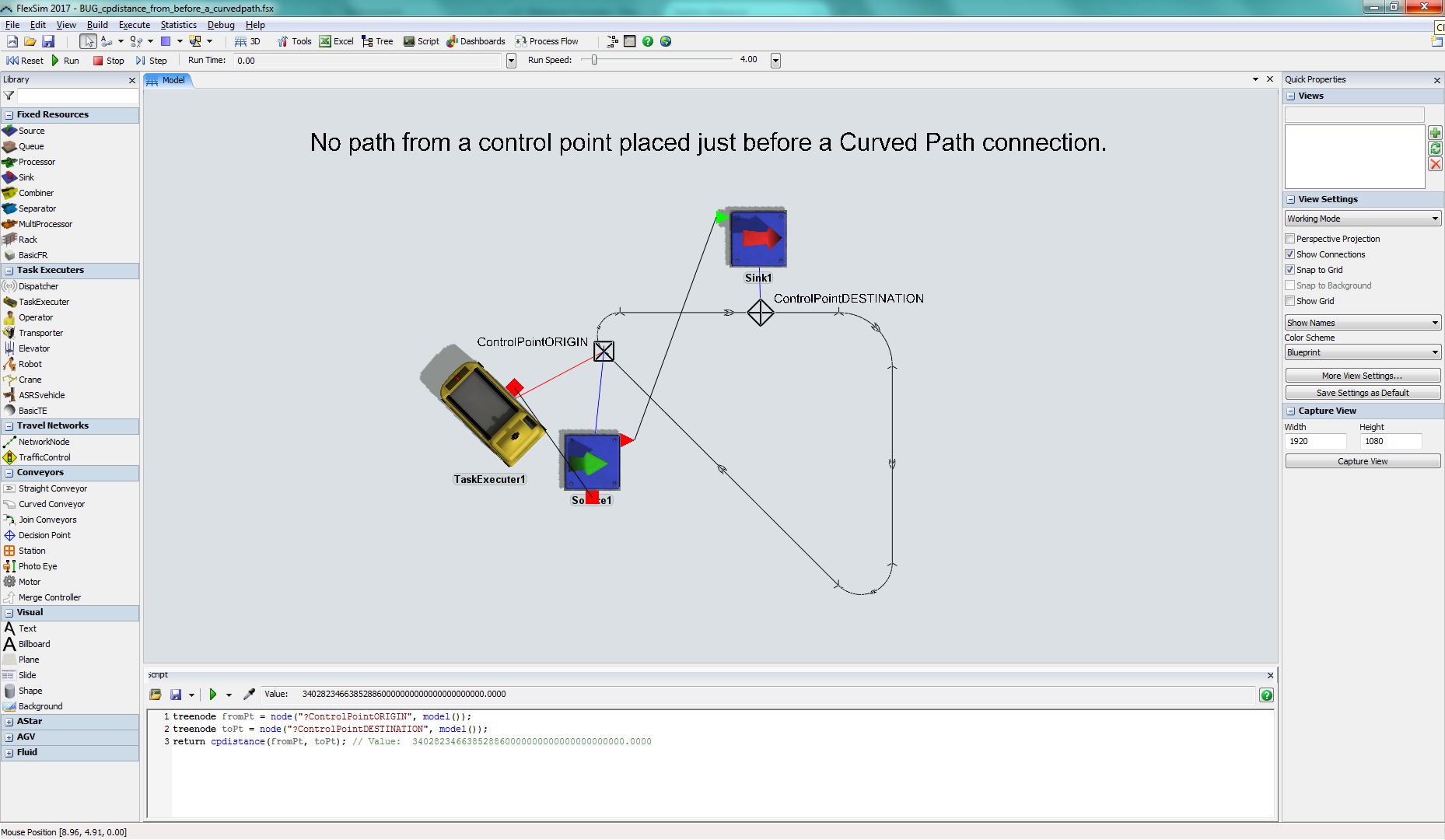
The AGV network could not resolve the route for TaskExecuter1 because of the following error: No valid path was found to the destination Destination: ControlPointDESTINATION
The network distance (cpdistance) between this point and any other point of the network appears to be a huge positive number. See the screenshot and the model to reproduce this bug: