This model, developed by @Jacob W2, demonstrates a method of using a kinetic tracked variable to measure process completion on a processor. This allows a processor to have a dynamic processing time, which isn’t possible using the standard processor logic. This is all handled though the use of an object process flow that easily allows other processors to be used in a similar fashion.
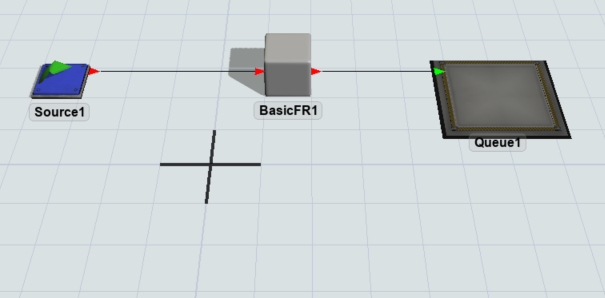
This is the basic layout for the model: a source, a basic fixed resource, and a queue. A basic fixed resource is used in lieu of a processor because it has no innate logic that needs to be dealt with.
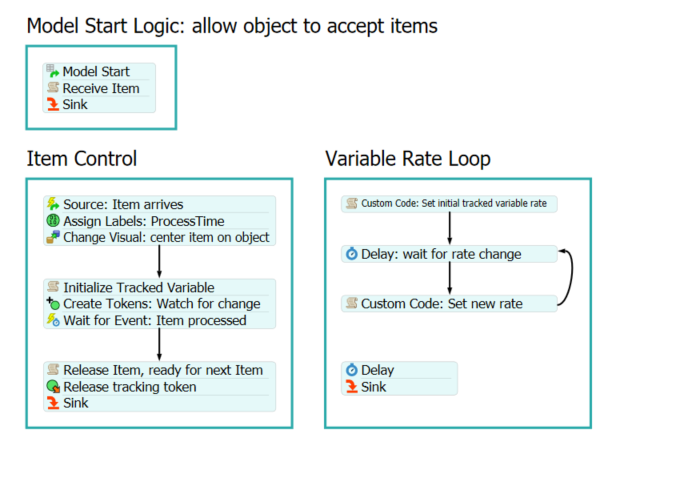
This is the object flow layout. It’s fairly simple, but handles all of the logic we will need for the processor to work. The “Model Start Logic” container allows the first item to enter the processor.
The “Item Control” section is the main feature of the model. A token is created whenever an item enters the processor. A process time label is created on the token, which sets when the process will be completed. This value should be set in model time units. For example, if a part takes one minute to complete and the model time is in units of seconds, the value should be 60.
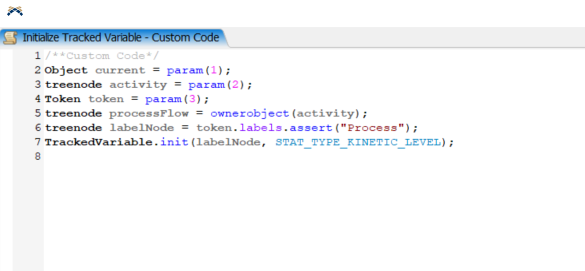
The Initialize Tracked Variable custom code activity is what actually creates the tracked variable that represents the processing progress. First, a treenode has to be created for the label, and then the tracked variable needs to be initialized with the correct type; in this case, a kinetic level tracked variable.
A token is then created in the Variable Rate Loop. This token is used to set the processing rate. First, the token will set an initial rate for the tracked variable, and then after a random delay, it will set a new rate for the part processing. It continues to loop until released by its parent token.
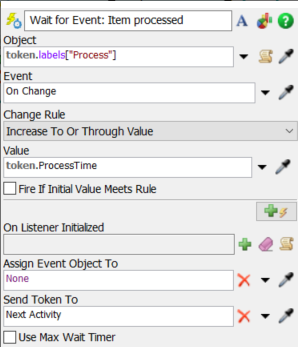
While the token for tracking the rate is looping, the token in the “Item Control” container is at the Wait for Event activity watching the tracked variable that we created. Once the tracked variable reaches the value of the process time label, the token releases the item from the processor, and then readies the processor for the next item through a custom code activity. The tracking rate token is then released to a delay and sink activity block, and the original token is then sent to a sink activity.
When another item arrives, a new token is created in the “Item Control” container, and the process outlined above is repeated.
This application of kinetic tracked variables can be extended to a more complex model that has varying process times based on the availability of operators. More specifically, this model allows operators to be added to the process dynamically when they are available, and the number of operators working on the process directly affects the processing time.
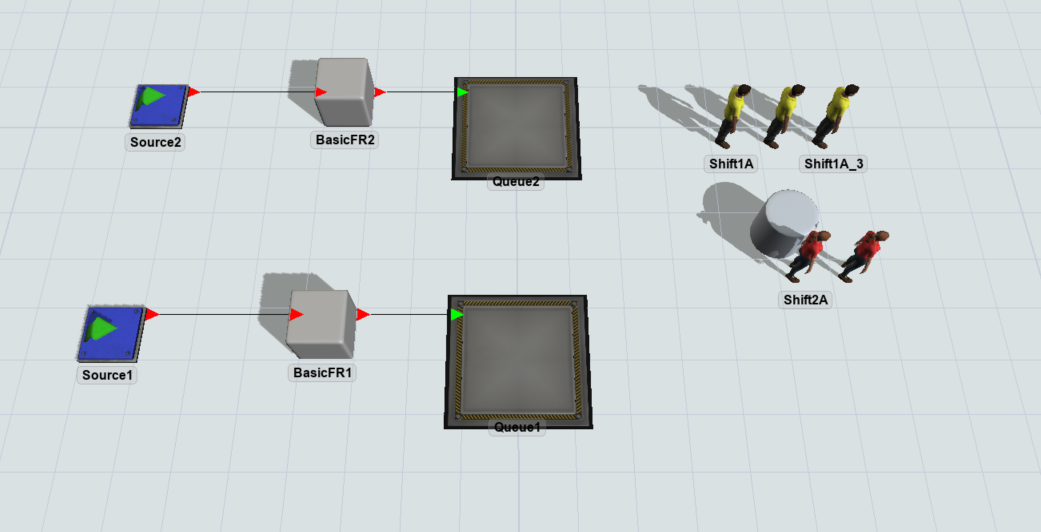
This model layout contains two sources, two basic fixed resources, and two queues in parallel. It also contains five operators, which are grouped according to their shift. A kinetic tracked variable is once again used to represent the processing time or completion rate of an item, and the rate changes dynamically based on the number of operators working on the job at a time.
The logic is contained in an object process flow, which is attached to the two basic fixed resources.
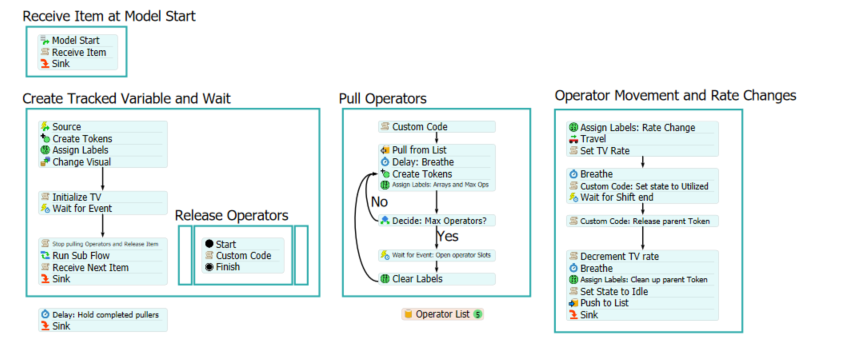
The first of the three main containers, “Create Tracked Variable and Wait,” creates the tracked variable for the processing time and waits for processing to be complete. The second container acquires the operators from a list based on the current shift. The last container controls operator movement and changes the processing rate. This logic allows operators to come and go during shifts. The rate can be changed dynamically.
As illustrated with the above examples, kinetic tracked variables are a powerful and versatile tool, allowing a greater level of control and customization over your model.
