Neste Tutorial iremos demonstrar em um exemplo como funciona a biblioteca AStar Navigator no FlexSim.

O AStar Navigator, também conhecido como A*, é um algoritmo de busca usado para encontrar um caminho entre pontos, e serve para determinarmos o trajeto pelo qual os executores de tarefas podem se movimentar pelo modelo. Esta biblioteca permite que você crie e defina barreiras físicas para a correta movimentação dos executores de tarefas em seu modelo.
Nós iremos usar o seguinte modelo para mostrar como o A* Navigator pode ser usado em um modelo simples. astar-example-model.fsm
Crie o A* Navigator
Primeiro, um objeto AStarNavigator deve ser adicionado ao modelo. Somente um objeto AStarNavigator faz-se necessário e permitido por modelo.
Crie um objeto AStarNavigator ao clicar e arrastar da biblioteca para qualquer posição na superfície de simulação em 3D.
Conectando os Membros
Neste modelo, existe apenas um objeto executador de tarefa (TaskExecuter), no entanto, nós também queremos incluir o Rack como uma barreira.
Faça um conexão com o 'A' entre o AStarNavigator e o operador. Isto pode ser feito mantendo a tecla A pressionada e clicando/arrastando do AStarNavigator para o operador, ou do operador para o AStarNavigator (não importando a ordem ou sequência de onde tem que partir a conexão). Um círculo em azul irá aparecer abaixo do operador.
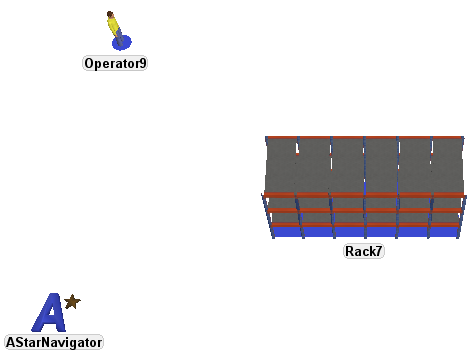
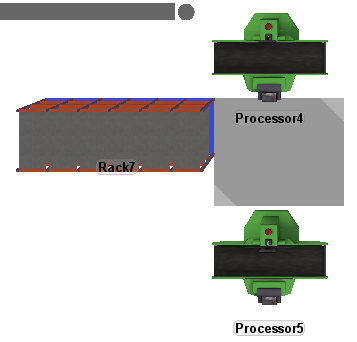
Faça uma conexão com o 'A' entre o AStarNavigator e o Rack. Um retângulo em azul irá aparecer abaixo do Rack. Adicione um Source e um Queue próximo ao operador conforme você pode visualizar em outra imagem mais abaixo.
Criando Barreiras (Barriers)
Junto com o Rack, vamos também criar um par de barreiras para representar paredes ou obstáculos que o operador não pode caminhar através.
Clique no ícone do Divider na biblioteca para entrar no modo de criação.
Clique em algum lugar ao lado direito do Queue (buffer) para criar um novo Divider.
Clique duas vezes mais próximo dos pontos para mostrar a imagem abaixo para finalizar o Divider.
Clique com o botão direito do mouse para sair do modo de criação.
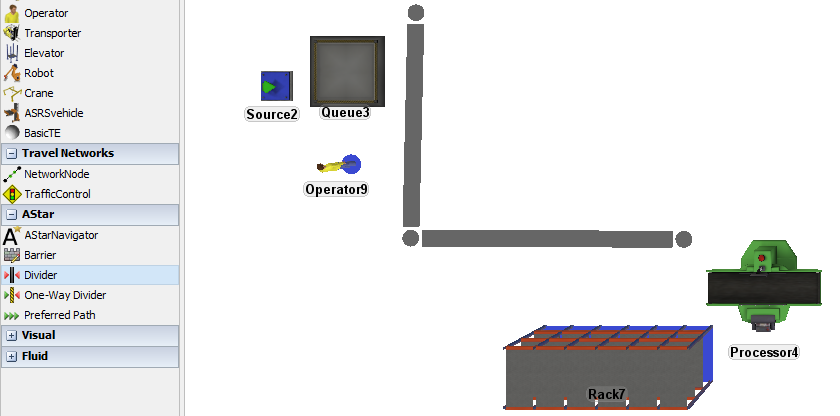
Adicione os Processors e um Sink conforme imagens abaixo. Faça a conexão deste o Source até o Sink usando a conexão com “A”.
Clique sobre o ícone Barrier na biblioteca para entrar no modo de criação.
Clique uma vez onde o canto esquerdo inferior do Barrier estará como mostrado abaixo.
Clique novamente no canto direito superior para completar a configuração do Barrier.
Clique com o botão direito para sair do modo de criação.
Coloque o Barrier abaixo do Rack.
Execute o Modelo
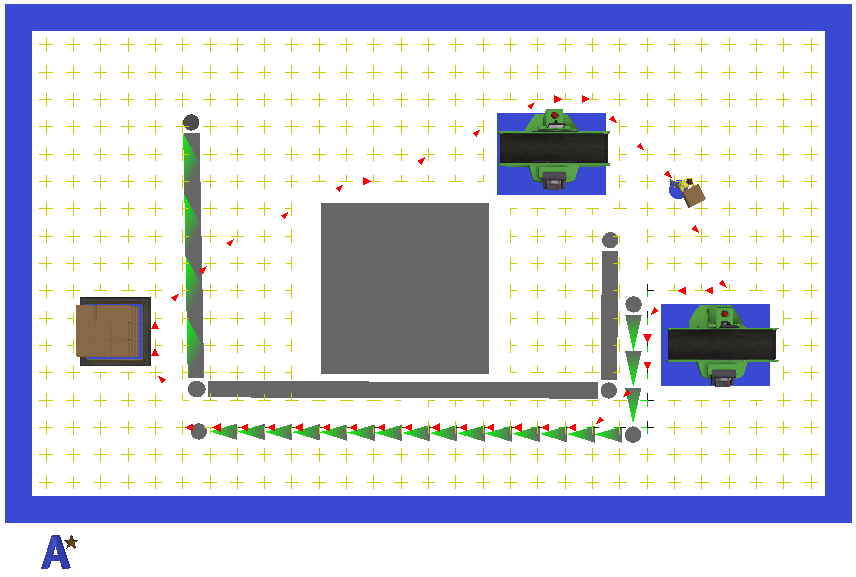
Você pode agora resetar e executar o modelo para ver como será a performance do operador. Lembre-se, se você fizer qualquer mudança nas suas barreiras, o modelo obrigatoriamente deve ser resetado antes de ser executado novamente.
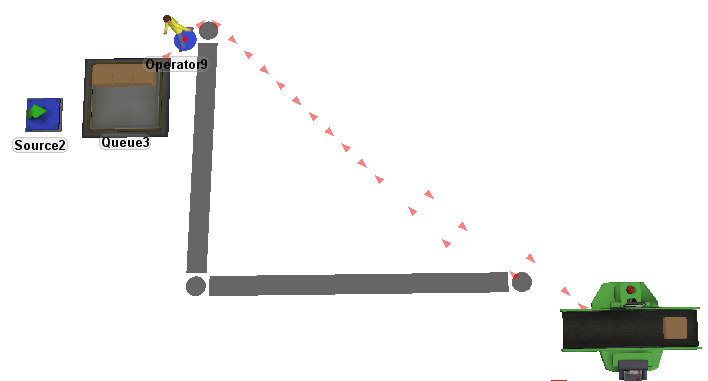
Note que o operador encontrou o menor caminho para movimentar-se por cima e por fora do Divider. Embora exista diversas formas de alterar os caminhos do operador (por exemplo, estender ainda mais o tamanho do Divider), nós iremos modificar o caminho percorrido pelo operador, usando o Preferred Path.
Crie Preferred Paths
Preferred paths não são caminhos “configuráveis”, em vez disso, dará aos nodes associados com o caminho preferido, um peso maior no algoritmo de busca. Isso vai nos afetar, e puxar o operador para o caminho preferido.
Clique sobre o ícone Preferred Path na biblioteca para entrar no modo de criação.
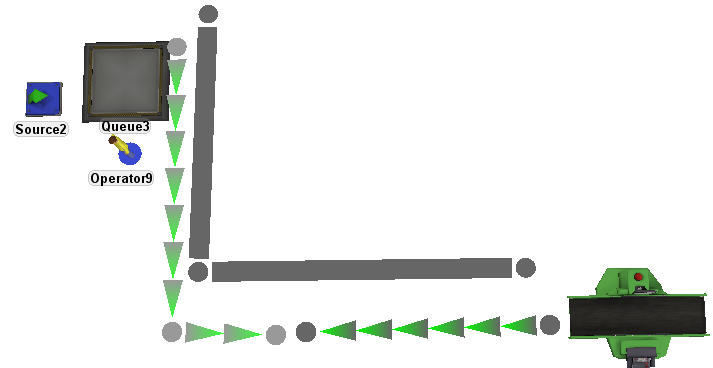
Crie os dois seguintes Preferred Paths conforme mostrado na imagem abaixo. Preferred paths são unidirecionais e além do mais precisa ser posicionado no layout na ordem correta.
Clique com o botão direito do mouse para sair do modo de criação.
Execute o Modelo
Resete e execute o modelo.
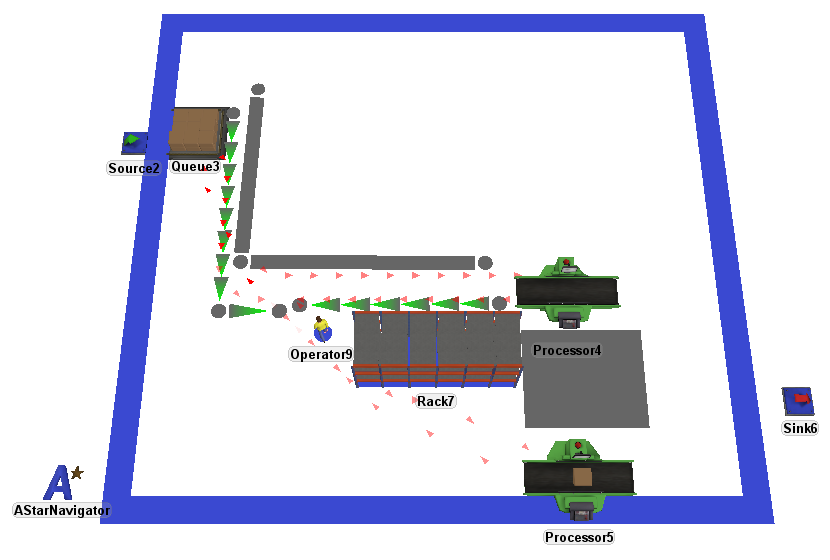
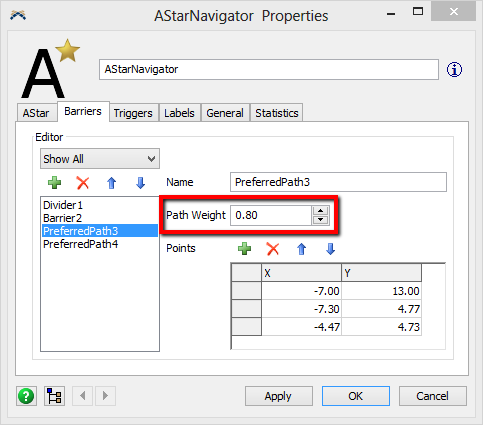
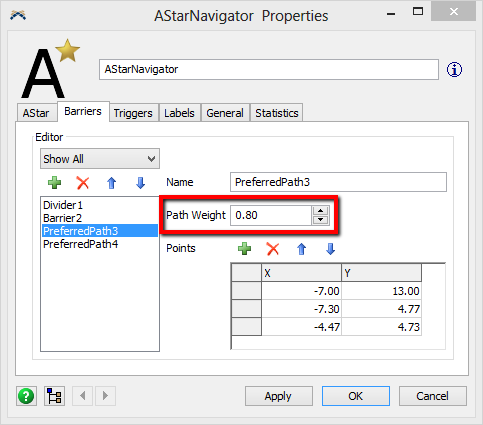
Se o seu operador continuar a movimentar para cima e fora do Divider, você pode ou movimentar o Preferred Path ou alterar o Preferred Path weight na janela de propriedades do objeto AStarNavigator.
Os Resultados do seu modelo podem variar deste exemplo conforme você posiciona suas barreiras e objetos, o que pode fazer a diferença no cálculo dos caminhos do operador.
AStar Navigator Library
O AStar é acessado na Biblioteca principal a esquerda: View Menu / Drag-Drop Library
Existem 5 tipos de barreiras usada pelo A* Navigator. Estas barreiras modificam a grade usada no algoritmo de busca.
Nota: Uma vez que as barreiras são criadas ou modificadas, o modelo precisa ser Resetado para recalcular o node table.
Solid Barrier
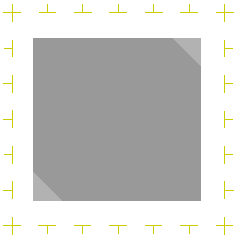
A mais simples das barreiras, a barreira sólida modifica a grade para remover uma área retangular, prevenindo os membros de viajar e (travel members) se movimentarem dentro da barreira.
Divider
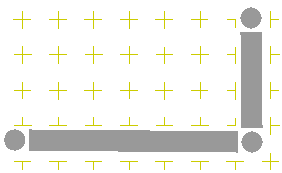
Dividers desconectam os nodes ao longo de seu caminho, prevenindo os travel members de atravessarem o divider. Dividers podem ser modificados na superfície de simulação 3D ao arrastar o ponto final e intermediário. Qualquer número de pontos pode ser adicionado ao divider.
One-Way Divider
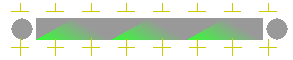
O One-way divider funciona de forma muito similar ao divider, no entanto, travel members são permitidos se movimentarem através do divider na direção das flechas em verde, neste caso, em direção ao topo da página. O one-way dividers pode ser modificado na superfície de simulação em 3D ao arrastar os pontos finais ou intermediários. Qualquer número de pontos podem ser adicionados em um one-way divider.
Preferred Path

Embora o preferred path não é uma barreira real, ele funciona da mesma forma que as barreiras fazem para modificar a tabela de nodes do A* Navigator. Em vez de modificar os nodes removendo os seus indicadores de direção, o caminho preferencial dá um peso maior a todos os nós associados com o percurso. Este valor de Path Weight pode ser alterado através da janela de propriedades do A * Navigator. O Path Weight tem de ser maior do que 0 e menor que 1, a fim de funcionar adequadamente. Valores acima ou abaixo deste podem causar resultados não intencionais. Os preferred paths podem ser modificados na visualização em 3D, arrastando os pontos do fim ou do meio. Preferred paths são unidirecionais. Qualquer número de pontos pode ser adicionado a um preferred path.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}