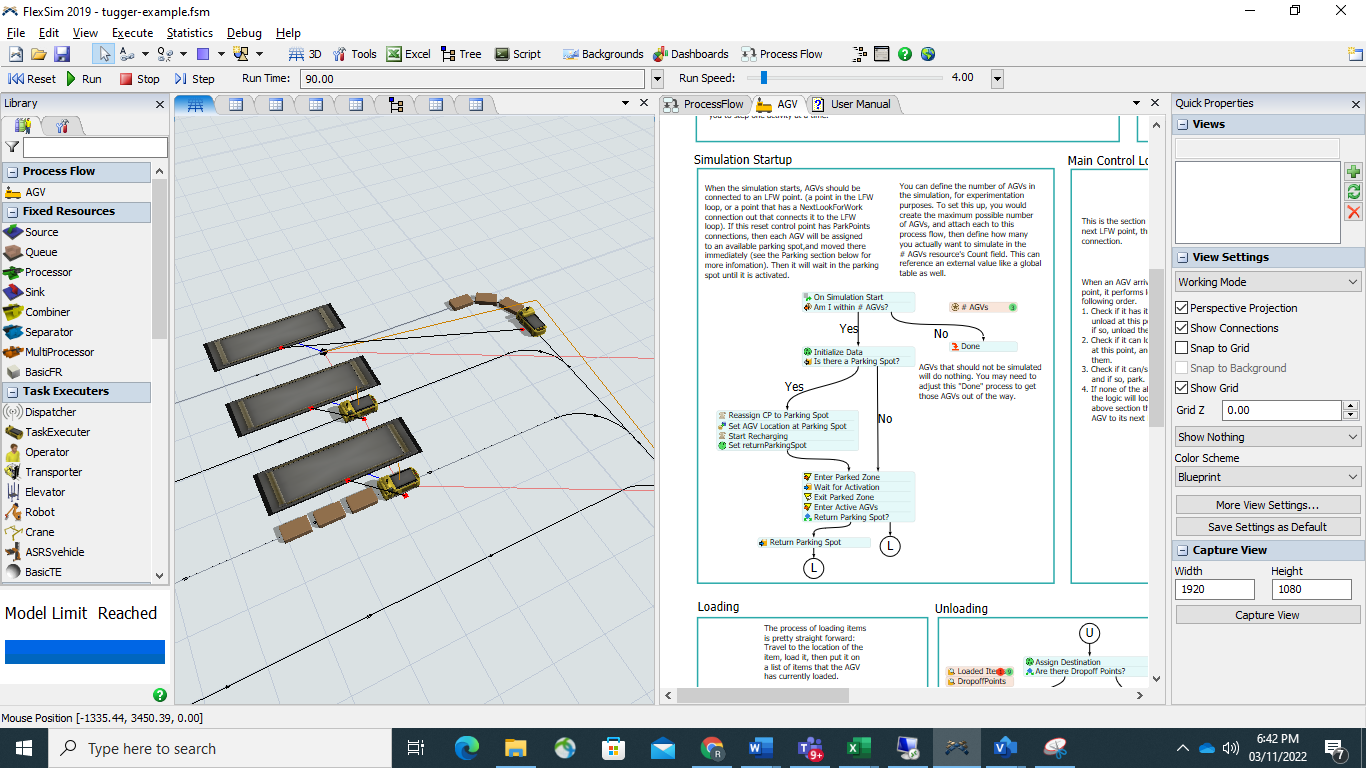
Here is the model I showed at FlexSimposium. It shows three tuggers traveling to various destinations and has a control area modeled to avoid collisions at an intersection.
AGV Tugger Example

10 People are following this idea.
Here is the model I showed at FlexSimposium. It shows three tuggers traveling to various destinations and has a control area modeled to avoid collisions at an intersection.
10 People are following this idea.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.