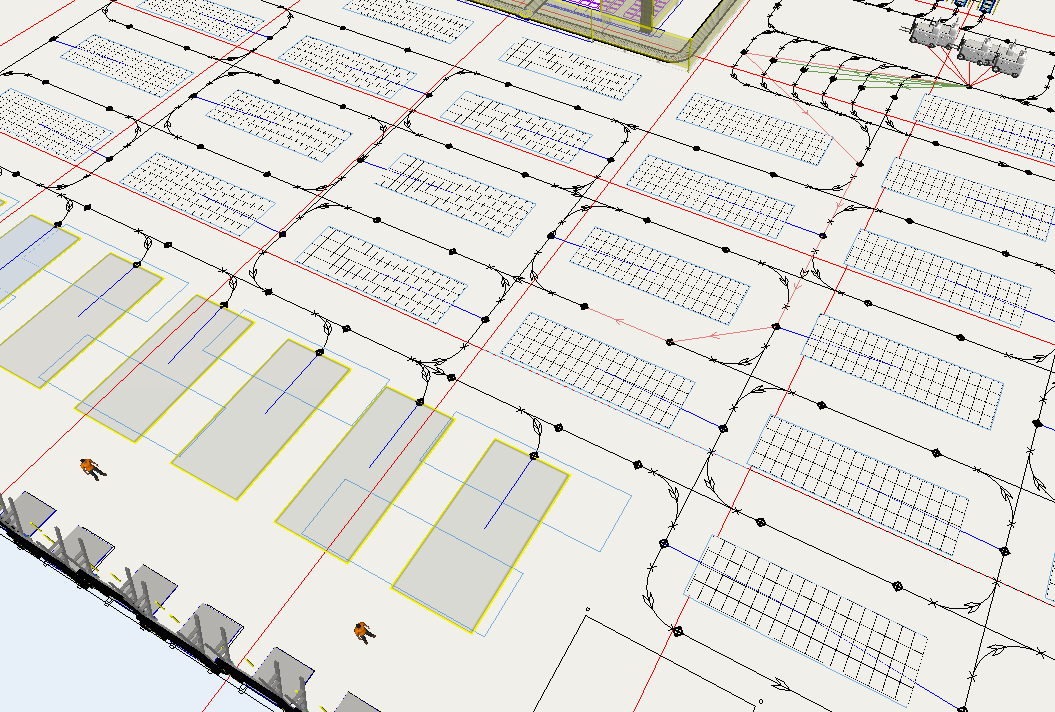
Hi all, I am working on an AGV model. I am using the advanced AGV process flow.
The one-way paths though, cross each other so there could be multiple work points stemming from one location. My question is what is the best way to assign work points in this configuration?