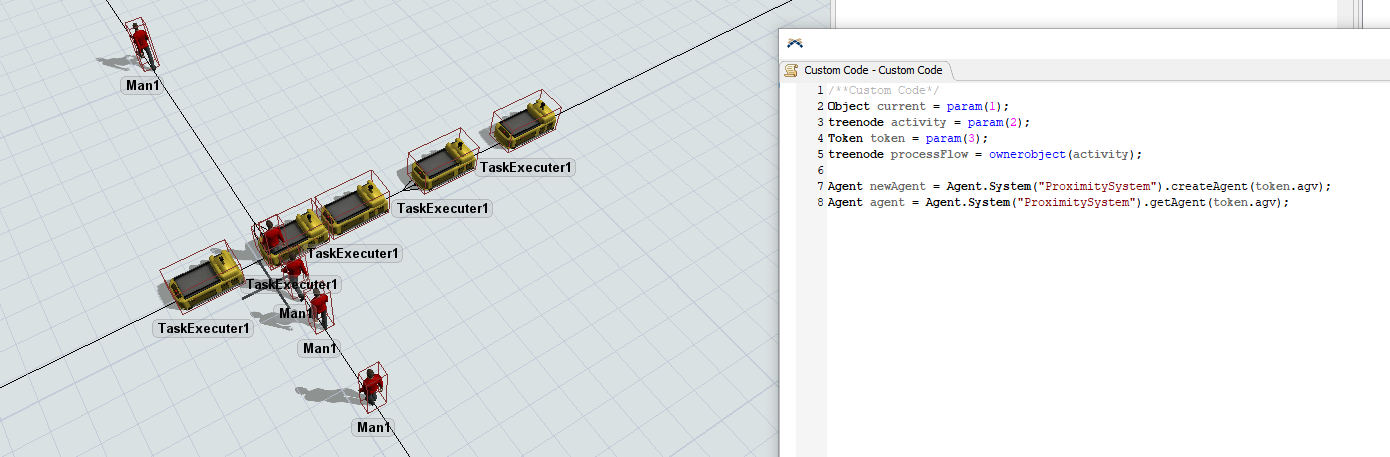
As you can see in below image there are AGVs and pedestrians crossing at intersection. I am using agent model proximity triggers to control.
Agvs has to wait for pedestrians to cross.
But the triggers like On Enter Proximity and On Exit Proximity are not firing.
I am attaching the model for reference.