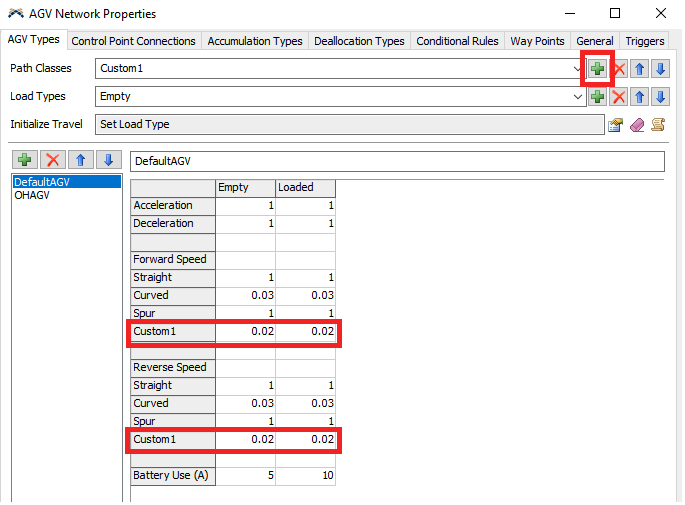
May I ask that I have set the curve path to slower speed, but the task executer seems only slow down at some curve paths, while others don’t. The taskexecuter not slowing is in the right hand side of the model. I have checked the Taskexecuter is set to defaultd AGV. Is there any possibility to make it controlled by some other place, so that taskexecuter is not traveling as I expected.
In the same model, I’m using 2 object process flows to control two taskexecuters, and try to make them look traveling forward and stop at the same pace.
I let the gripper to push to list, then the chasis pull from list, to let them look like ONE but actually they work separately.
I cannot find the mistake why after go through cp above queue8, the token represent gripper would stay in the travel activity(but can not see it move forward in animation).