I attach a model.
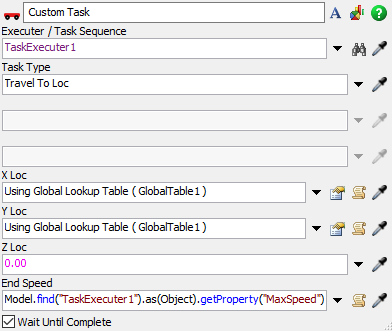
The AGV moves by referring to the coordinate values and acceleration information in the global table.
My hope is to inherit the previous acceleration and accelerate more and more as we move toward the next coordinate value.
However, the model resets the acceleration as it moves toward the next coordinate value. Is it possible to set the operation that inherits the acceleration?