In my project I need that a robot (Robot3) moves through 4 stations. In particular at first a new piece arrives, it moves it to a processor (laser) but before, by considering the regime case, it has to pick the product after laser (placed in laser end), then it moves to the silicone station and has to make the same task as before. I also upload the file since I have an error dealing with Pallet MBC out but it doesn't affect the simulation at all 6.fsm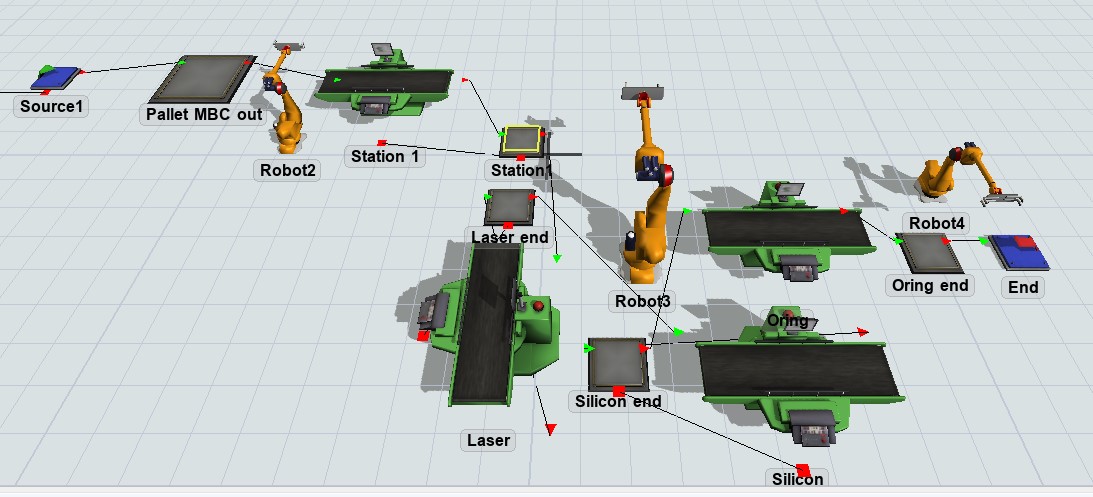
Is it possible to make a sequence of pick-pick-place for a robot?
FlexSim 22.0.1
Just put it on a network:
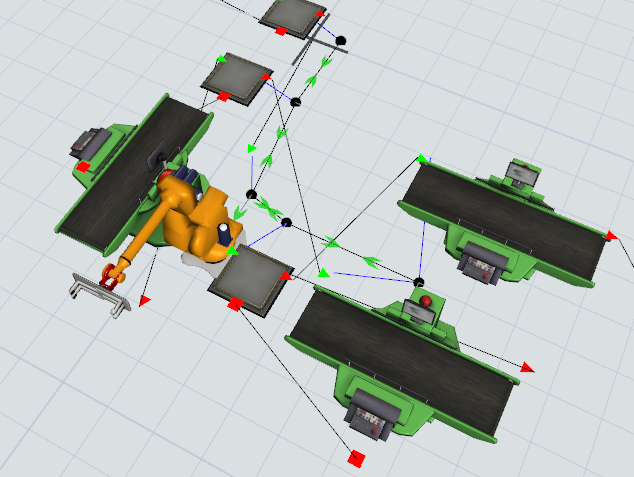
Model:
If you need better control of the cycle you can try to give priorities to the tasks sequences generated by the transportdispatcher triggers, or create a process flow to create the tasks instead.
The file you sent back works fine but just with the first 2 stations. Did you implenent something other than the networks since I don't understand how to change it?
No I just added the network and attached the robot to a node and the destination objects to respective nodes.
I'm not able to do this. If I share a video of what this robot has to do, can you help me?
I turned off rotation of the robot in this version it looks better.
Explain what you want to do differently with reference to event times and object names in the model - what you see happening and what you expect to happen.
When at regime, the robot (whose position is fixed) must perform these tasks in this specific order:
1) Pick from Station1
2) Pick from laser end
3) Place in laser
4) Pick from Silicon
5) Place in Silicon
6) Place in Oring
In fact in a single cycle all the objects in the stations are processed and then in reality they remain in the stations until they are picked up and a new object is placed and then processed.
In the warm up phase the tasks are similar but initially not all the stations are full, but at each cycle they will be sequentially replenished (In particular in this phase the order of the tasks is:
1) - 3) - 1) - 2) - 3) - 5) - 1) - 2) - 3) - 4) - 5) - 6) - regime
This is best done in a process flow I think. In the attached model I push the item in the first station to the a list and once the robot has pulled that off the list it proceeds to move the items through the processes using the "nextStation" reference on the processors (I used this method to make it clear we're not using ports). As such I was able to remove the extra queues you had.
9.fsmOk, it works good other than when finishing a cycle of 16 objects, 2 of them remain in the stations laser and silicon rather than being sent to the sink all 16 at each "batch cycle". I attached the file with some modifications I also needed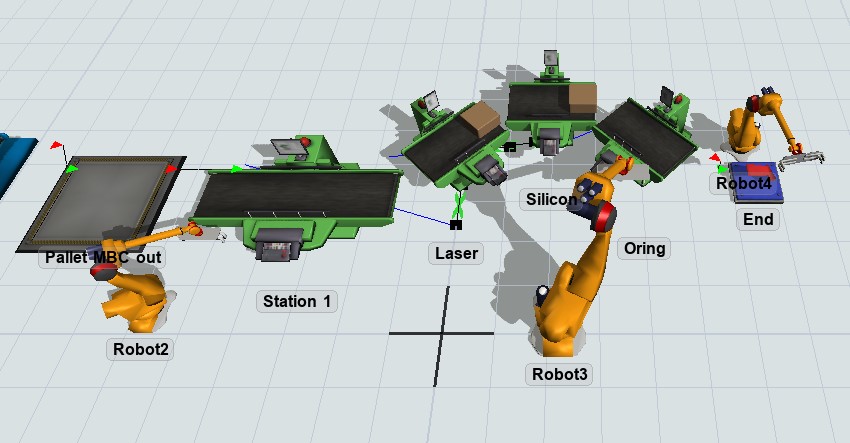
I'm taking a look now. First things I notice:
1) The robot is now in a fixed position? Not travelling as you first described?
2) We create one token at time zero for the Robot which represents its activity cycle. You've changed that to an interarrival which is incorrect, since at some point there will be two competing actions for the robot.
3) You'll need a batch counter or label somewhere so that the robot knows which is the last box and returns to that instead of the first station - but it should be part of the same process flow - and use the same token.
Attached I've added the robot placement trigger; changed colors so you can distinguish boxes, and added boxes arriving at time zero to easier test.
I don't know why but when starting the second cycle the third robot stops while picking the first object and instantly also the second object arrives
When it's the last in batch we need to leave the station on the list of those available.
Just another question, if I try to implement MTBF/MTTR at the 3 stations, after a certain number of cycles the simulation crashes when a failure happens to the Oring station. I attach the new file pro_failure.fsm
It would be best to start a new post for this new question. Since Jason has helped you with this model and is familiar with it you can tag him in the new question.
15 People are following this question.
