Hello,
I have no idea to solve the Problem:
I want to avoid a collision with the Robot an the Flow Item.
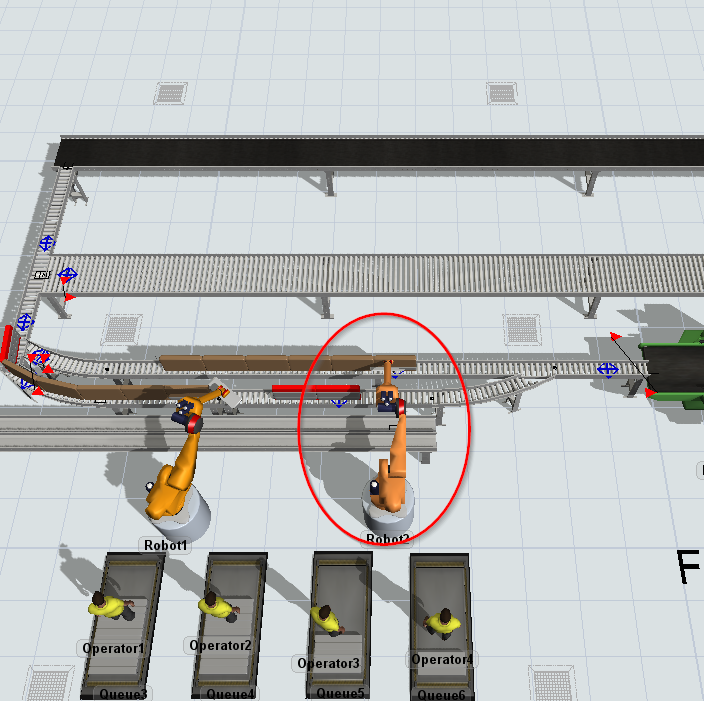
So the red item has to wait till Robot is finished. I tried it with Agent Systems but i think it doesn't work with Flow Items.
Thanks for your help.
