Hello, I build a model with next work point branches. I have asked a similar question about the next work point. The suggestion is that the next work will find the place to load and unload the item as the machine run through the CP that is in the loop.
I’ve encountered 3 problems for my model now:
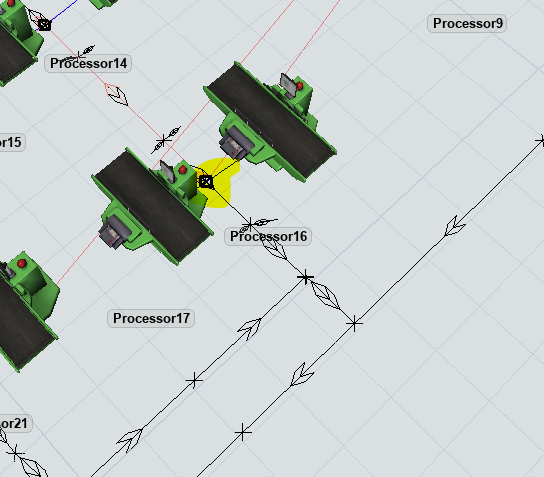
- When AGV pass the control point it will not implement the unload task to the processor. There are two processors that the AGV will implement the unload process, but the thing is that it will not pick up the finished product and send it to the sink (the output of both the processor and sink are 0).
- Why some of the AGV will stay at the pickup point for so long instead of sending resource to the processor.
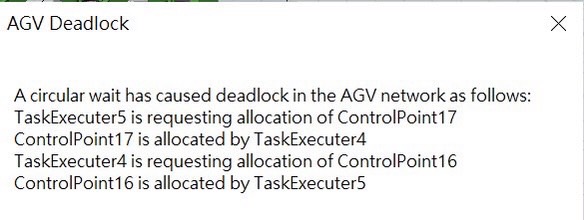
- When I use 2021 version to run the model for a while, it will show the error below. I’m not sure how to fix this problem. But when I use 2023 version to run the model, there’s no such issue. So I am wondering could it be the problem of the version I used?
my model: 0708.fsm
Hope to get some suggestions, thank you!!!