Hello! I need to create a model for a logistics terminal with containers and reachstackers, just like what is shown in the following video:
How could I obtain that element? Or what would be the easiest way to create it as a task executer?
Thanks!
Hello! I need to create a model for a logistics terminal with containers and reachstackers, just like what is shown in the following video:
How could I obtain that element? Or what would be the easiest way to create it as a task executer?
Thanks!
Here's the model. The reach stacker is build from a Basic TE. The arm is extended/lifted as part of the offset travel off load and unload tasks. It is retracted after an item is loaded or unloaded in the respective trigger. If the "WaitForArmReset" label is set to 1, the reach stacker will receive a preempting delay task for this time, to keep it stationary until the arm is fully retracted. The other labels are used to store information (mainly kinematics data) and should not be changed.
The reach stacker should generally be usable like any other task executer. Though it is assumed that it only ever loads a single item.
Since this was only meant as a demo, the logic that calculates how far the arm has to lift/extend to load an item uses hardcoded numbers in a couple of places. If you resize the stacker it will not work properly.
I understand! Thanks, I'll work with that and see how it applies to my model.
Hello Felix, you model is great, how can I import the reach stacker TE into another model please ?
Thank you in advance for your help,
kind regards
Aurélien
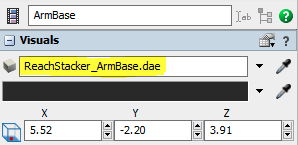
The object itself you can just copy over or add it to a user library and transfer it that way. You then have to reassign the 3d shapes.
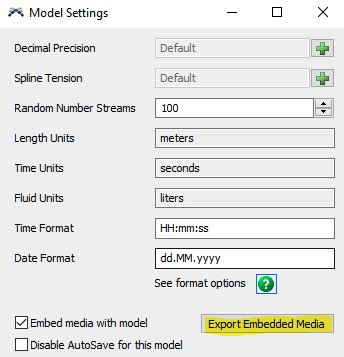
Export the embedded media from the original model.
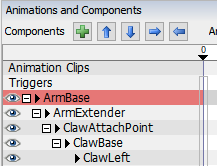
Readd the shapes to the reach stacker object itselfs and its components in the animation editor.
There might well be a way to automate this by adding the shapes to a user library, but I do not know how to do that currently.
Hi Felix, I browsed the model, awesome indeed ! But I have a question: why have you preferred using the kinematics for animating the crane moves, instead of the animation tool ? there is just one animation: the drive. Wouldn´t have been easier to animate all the other movements ? I am asking this cause I need to implement something similar on a fork lift with clamps, that also rotates 90º. I am thinking to use the animation....
An animation lacks off return values for durations. Kinematic was longer the only mechanism to move objects inside FlexSim. Kinematic has been introduced later as a feature.
If you want to apply results of movements to a model and you need them applied independently from run speed then you can set locations based on kinematic durations as timed events.
Kinematics provide more data during execution than you can gather from an animation.
Since the arm components need to be able to reach any position in a continuous spectrum, animations aren't really an option.
They are more suited for repeating movements that always look the same, like the opening/closing of a door or a robot moving along an item to simulate a welding path or something.15 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
