Hello All,
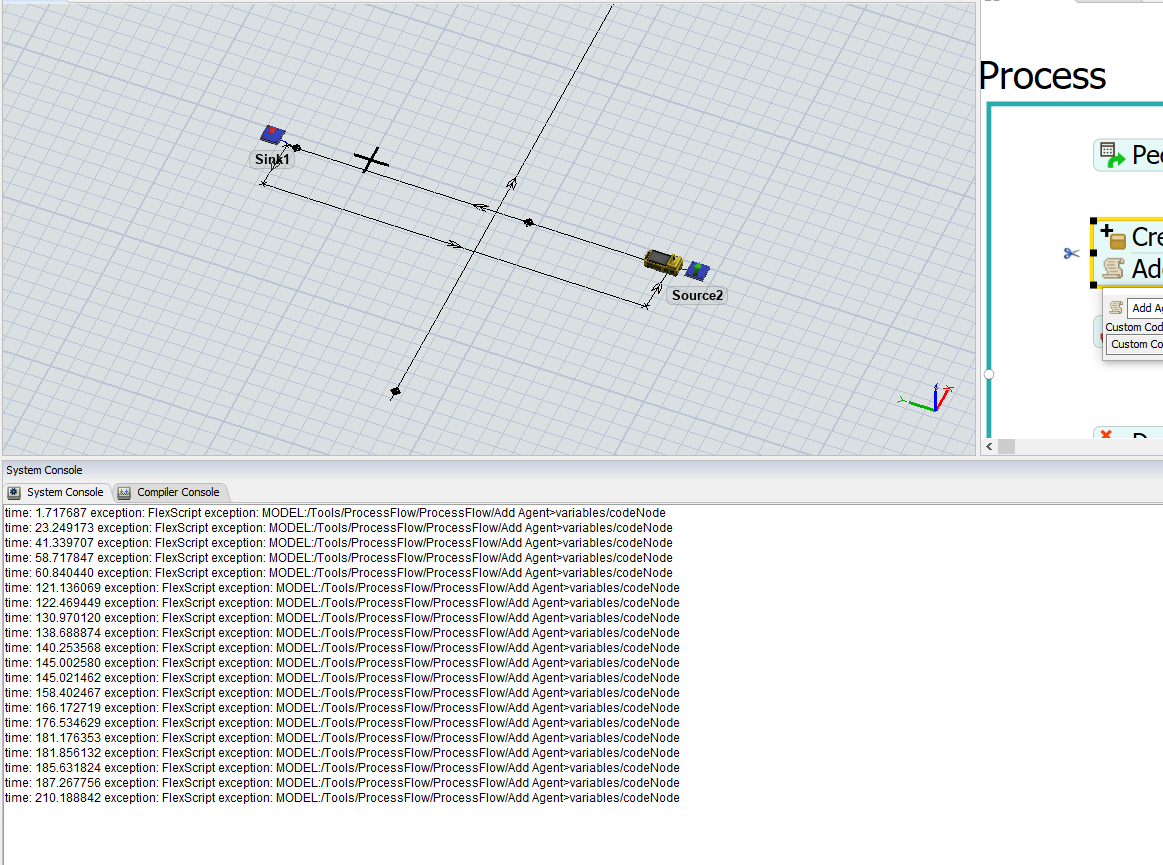
In this model i used traffic control to avoid collision between operators and AGV.
But when operators moving through path, AGV is not stopping its continuously moving and collide with operators.
I need that AGV Will stop when operators moving...AGV_OP Collision.fsm