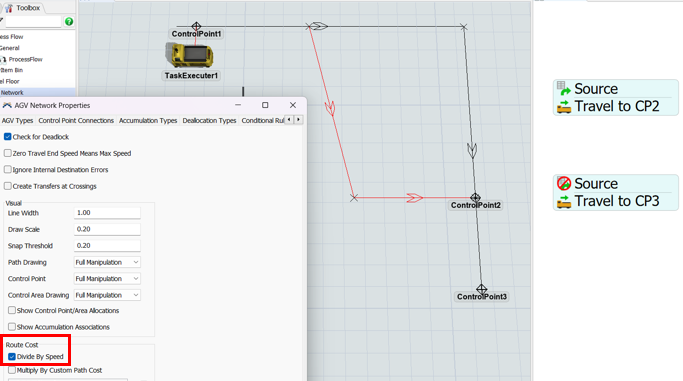
I want to replace part of the logic of the AGV module with my own. For example, I want to change the way the routing table is calculated.
However, I can't see the contents of the AGV.dll file and I don't know how to do it. Could you please give me some advice? Thank you.