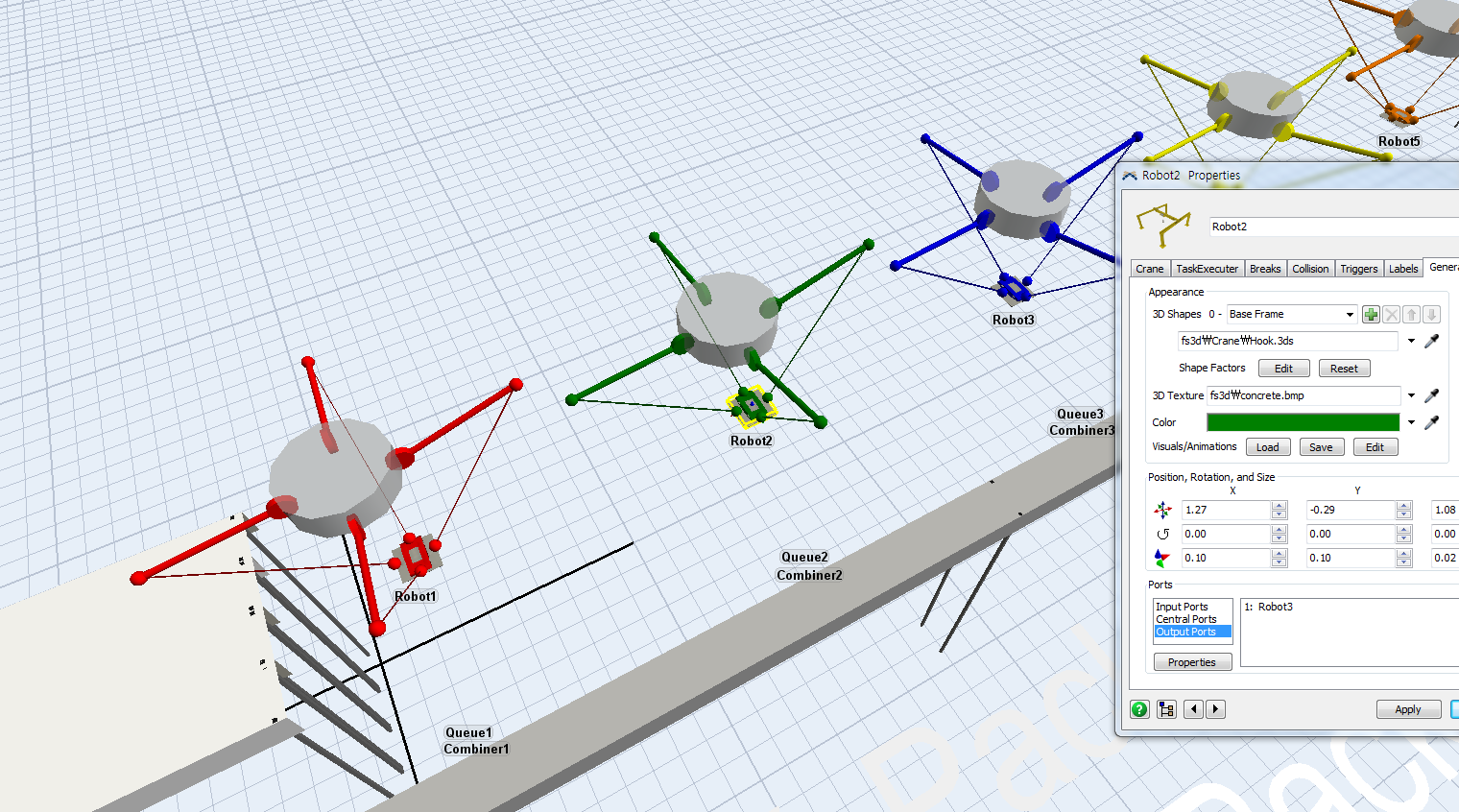
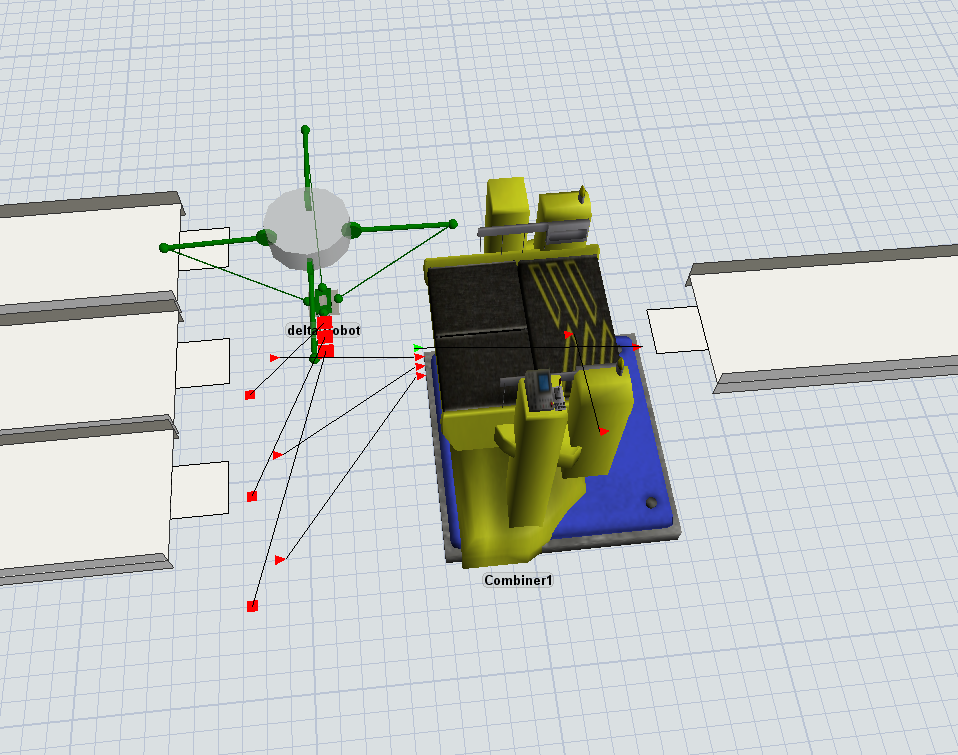
I want to set the visual shape of Delta like spider arms.
I found the model made by Kris Geisberger in the old forum. But I can't display the arms of the delta robot. Kris made to show the spider shape in Custom Draw trigger (The old OnDrawtrigger) only using script. The spider is customized from Crane object.
How can I control to show the arms of it?
or other methods?
It is important to show the spider robot.
{kind=link}