
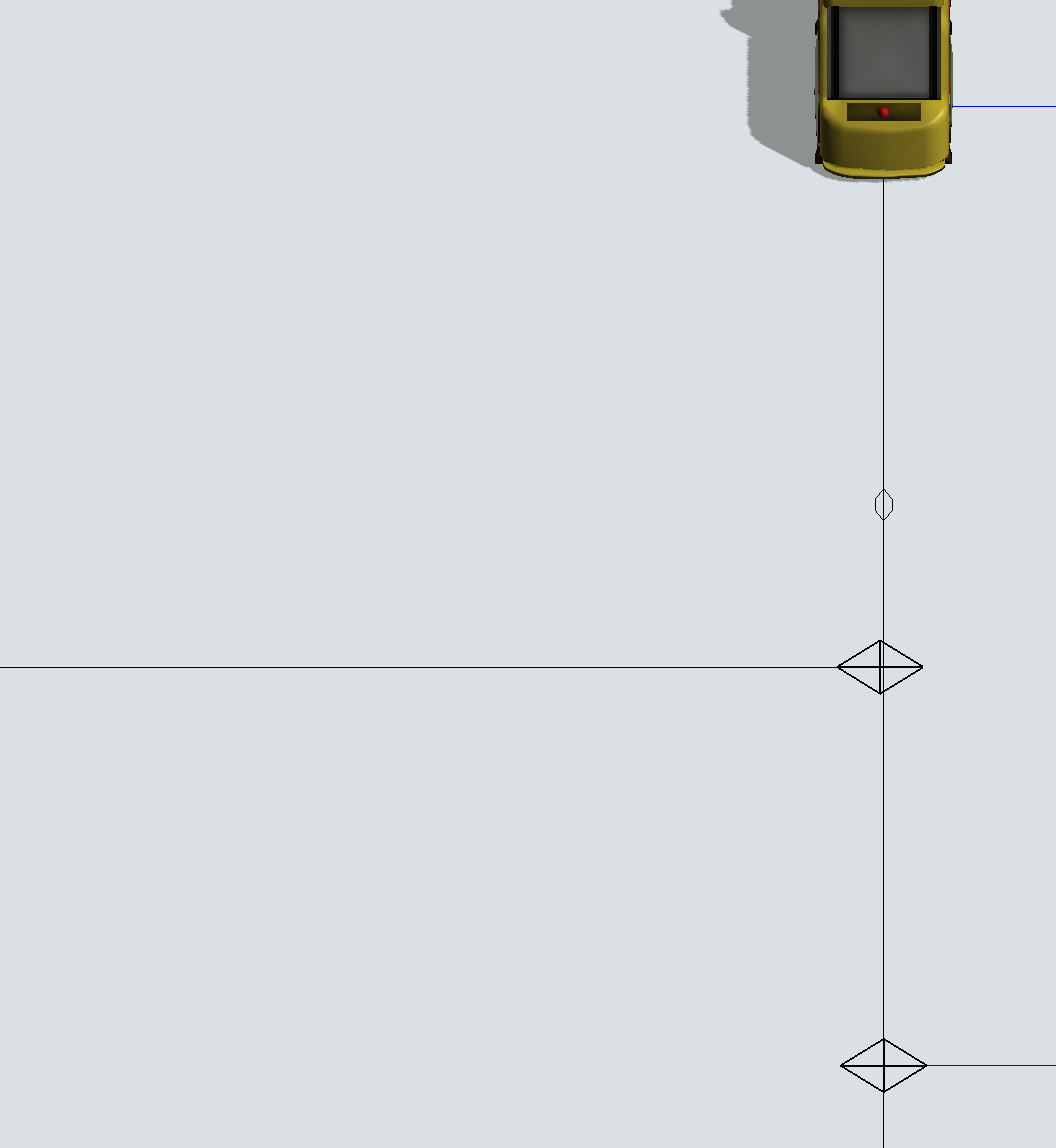
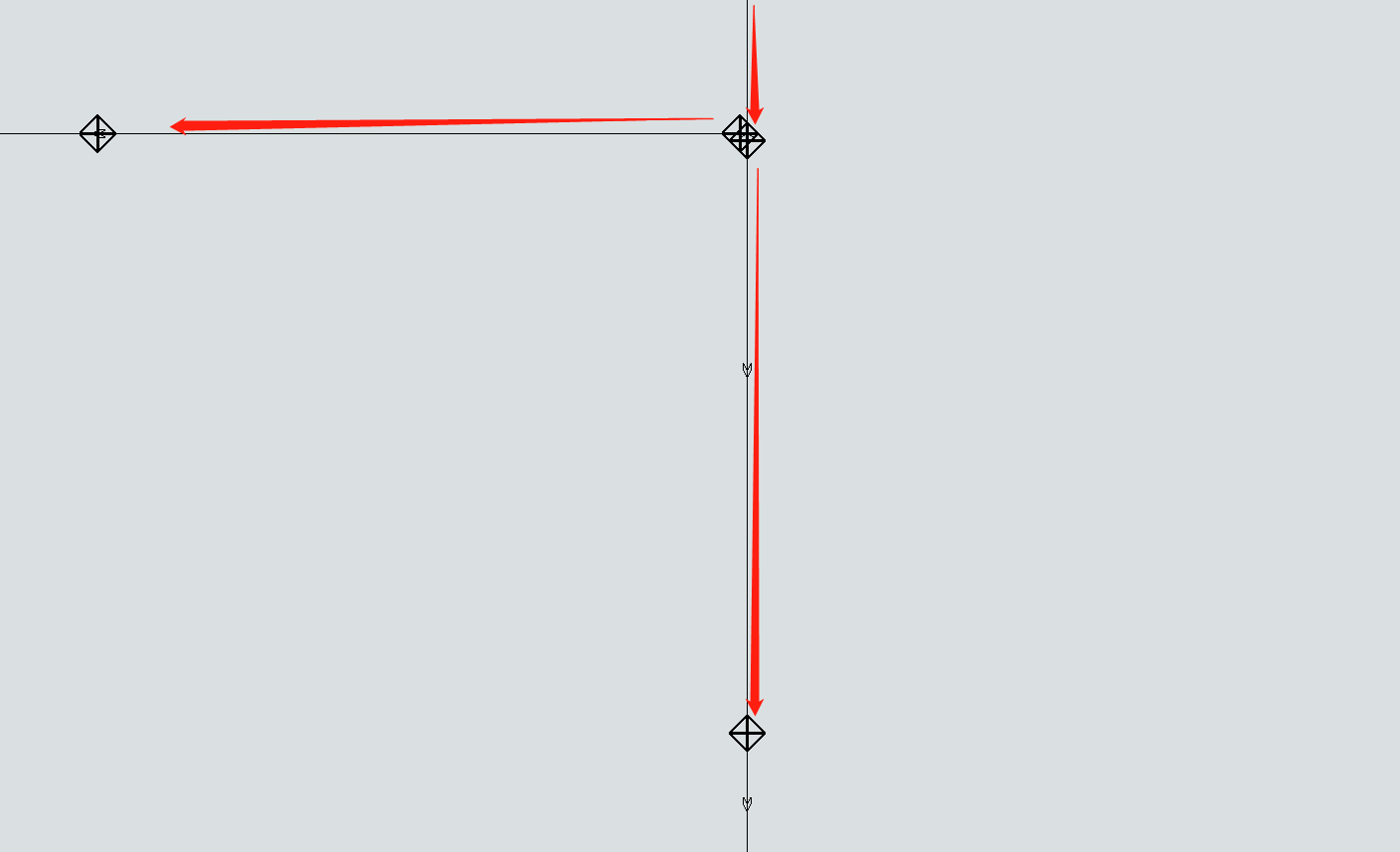
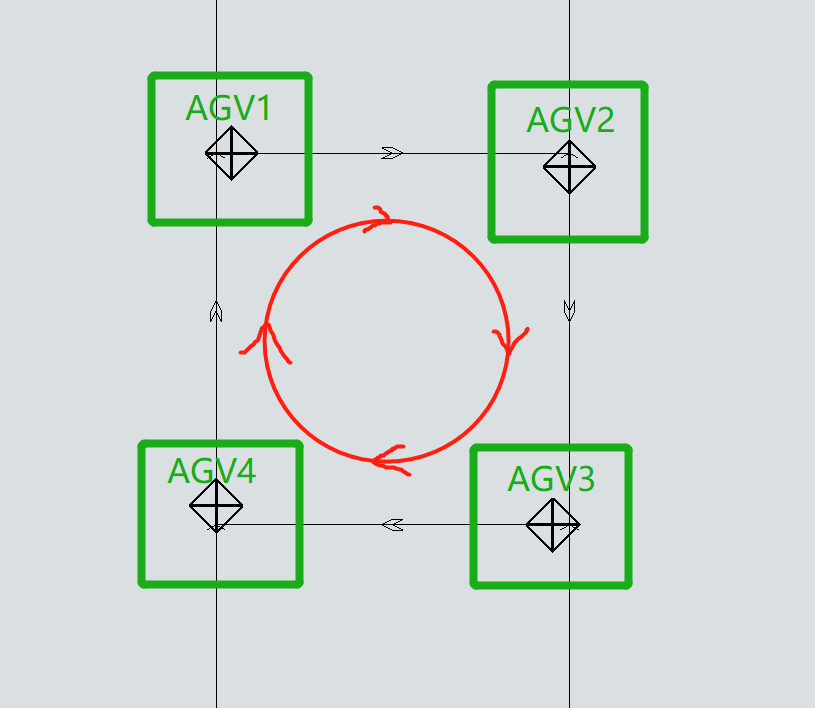
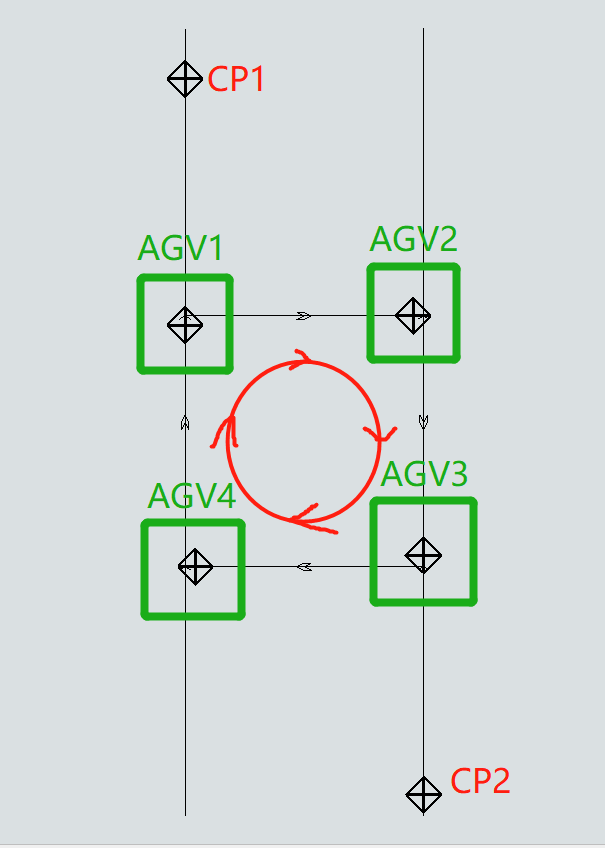
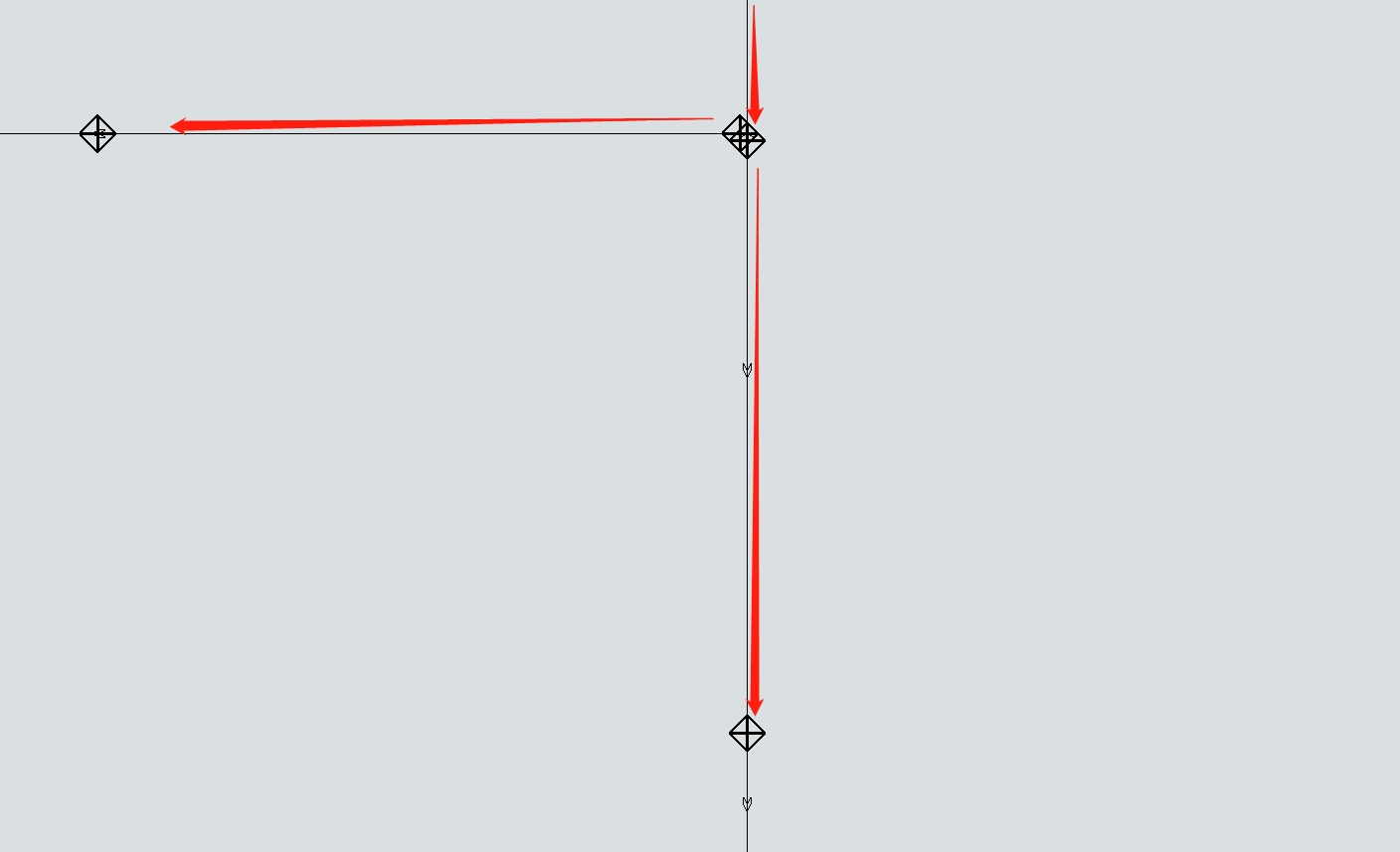
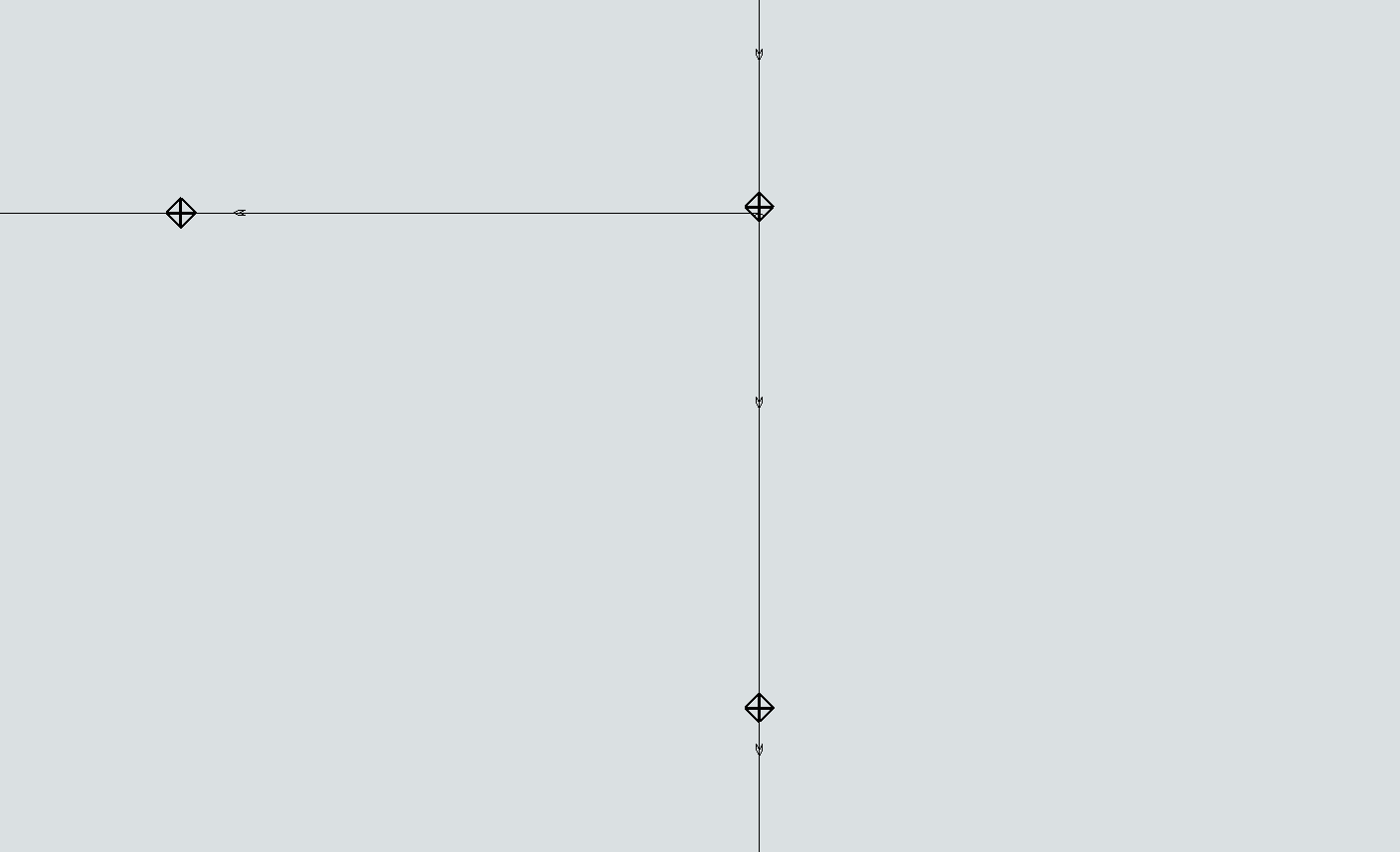
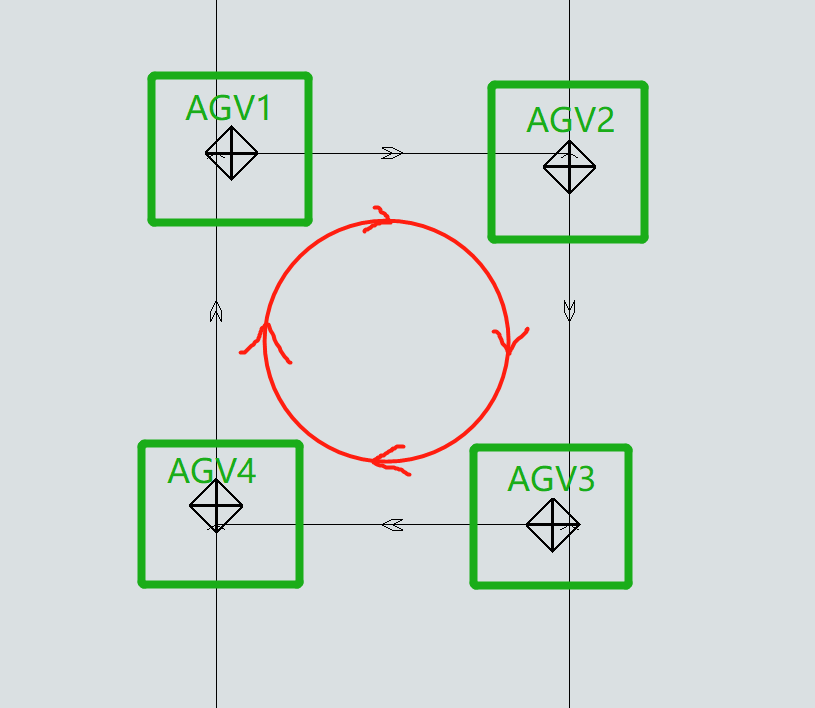
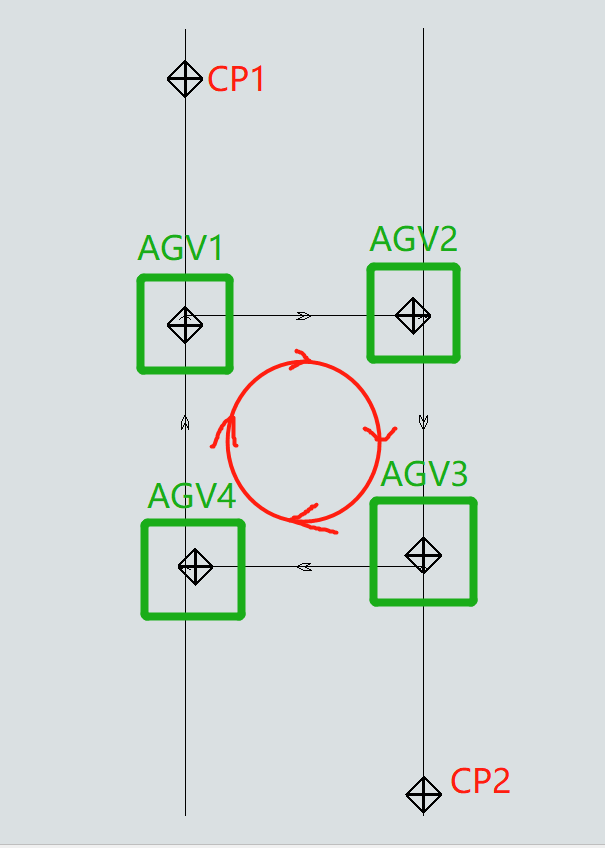
I use a interval timer to simulate the situation where an AGV rotate at a crossroad.The AGV needs to decide whether it should rotate before arriving the crossroad as that it takes time for AGV to decelerate to a stop. If it is a yes,then AGV slow down and stop and prepare for rotation, on the contrary, AGV keep going without deceleration.
As in my model, i need to figure out AGV's nextCP when the On Pre-Arrival trigger is fired, but i failed. Is there a method to accomplish this?

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}