The scenario happens when I have multiple AGVs, my AGV has a capacity of 4, my input comes every 4 item with 69.82s, thus it assign 4 AGV to load each item, but what I want is one AGV to load 4 items.
The better option is to correctly employ the AGV Process Flow - which is done by not using the dispatcher for transport but instead using the option Push Item to List (no task sequence) which will put it on a list called AGVWork.
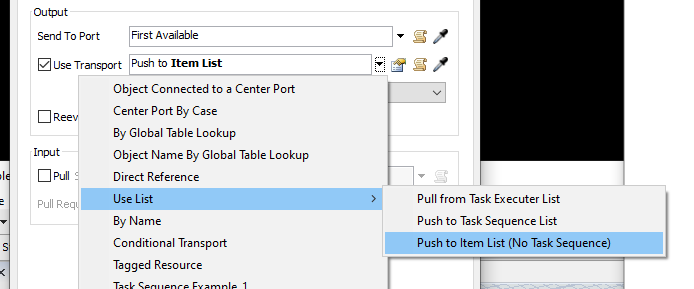
This is as per the Description in the AGV Process flow template which you should read in full.
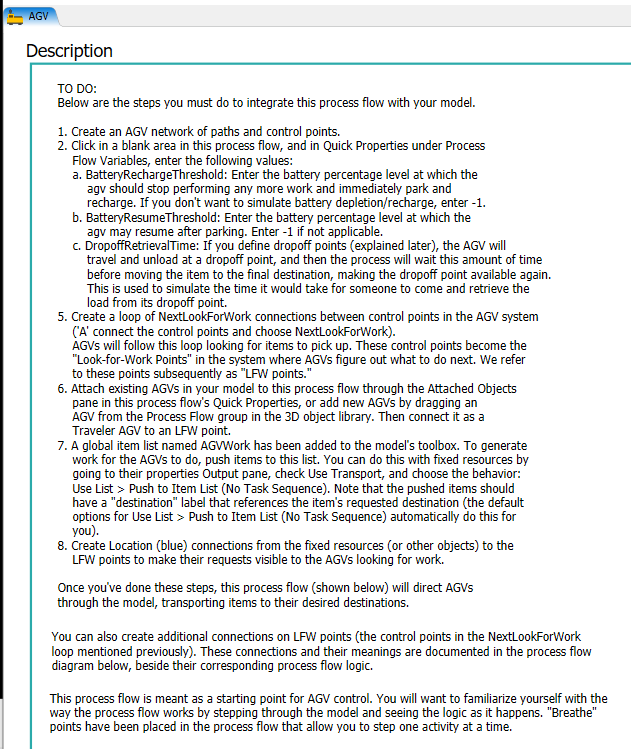
Your model attached is updated to use the process flow template.
That's because the PassTo of the dispatcher is not looking for already allocated work.
Use this code for the PassTo which has a section to look for a matching destination of any AGV:
- treenode tasksequence = param(1);
- Object current = ownerobject(c);
- /**Pass to the object closest to the destination if available*/
- /**If the object is on a network, then network travel is calculated; otherwise centroid-to-centroid distance is used.
- /**Consider available objects only if none are found, then the tasksequence will be queued up using the
- Queue Strategy, and will be sent to the first available.*/
- double curmin = GLOBAL_UNREACHABLE;
- int minindex = 0;
- treenode destination = NULL;
- for (int taskrank = 1; taskrank <= gettotalnroftasks(tasksequence) && destination == NULL; taskrank++) { // this finds the first task in the tasksequence that is a travel task.
- if (gettasktype(tasksequence,taskrank) == TASKTYPE_TRAVEL)
- destination = gettaskinvolved(tasksequence,taskrank,1);
- }
- if (destination==NULL) // first available if there is no travel task
- return 0;
- //Check if there's a matching destination.
- for (int index = 1; index <= current.outObjects.length; index++) {
- treenode curobj = current.outObjects[index];
- if (curobj && isclasstype(curobj, CLASSTYPE_TASKEXECUTER)) {
- if (inputopen(curobj)){
- treenode ts=gettasksequence(curobj,0); //TaskSequence ts=gettasksequence(curobj,0);
- if (objectexists(ts)) {
- int curtask=getcurtask(ts);
- for (int taskrank = curtask; taskrank <= gettotalnroftasks(tasksequence) ; taskrank++) { // this finds the first task in the tasksequence that is a travel task.
- if (gettasktype(tasksequence,taskrank) == TASKTYPE_TRAVEL) {
- Object taskdest = gettaskinvolved(tasksequence,taskrank,1);
- if (taskdest==destination)
- return index;
- }
- }
- }
- }
- }
- }
- for (int index = 1; index <= current.outObjects.length; index++) {
- treenode curobj = current.outObjects[index];
- if (curobj && isclasstype(curobj, CLASSTYPE_TASKEXECUTER)) {
- if (ipopen(curobj, opipno(current, index)) && inputopen(curobj)){
- double curdist = distancetotravel(curobj, destination);
- if (curdist != GLOBAL_UNREACHABLE && (curmin == GLOBAL_UNREACHABLE || curmin > curdist)) {
- curmin = curdist;
- minindex = index;
- }
- }
- }
- }
- return minindex;
13 People are following this question.
