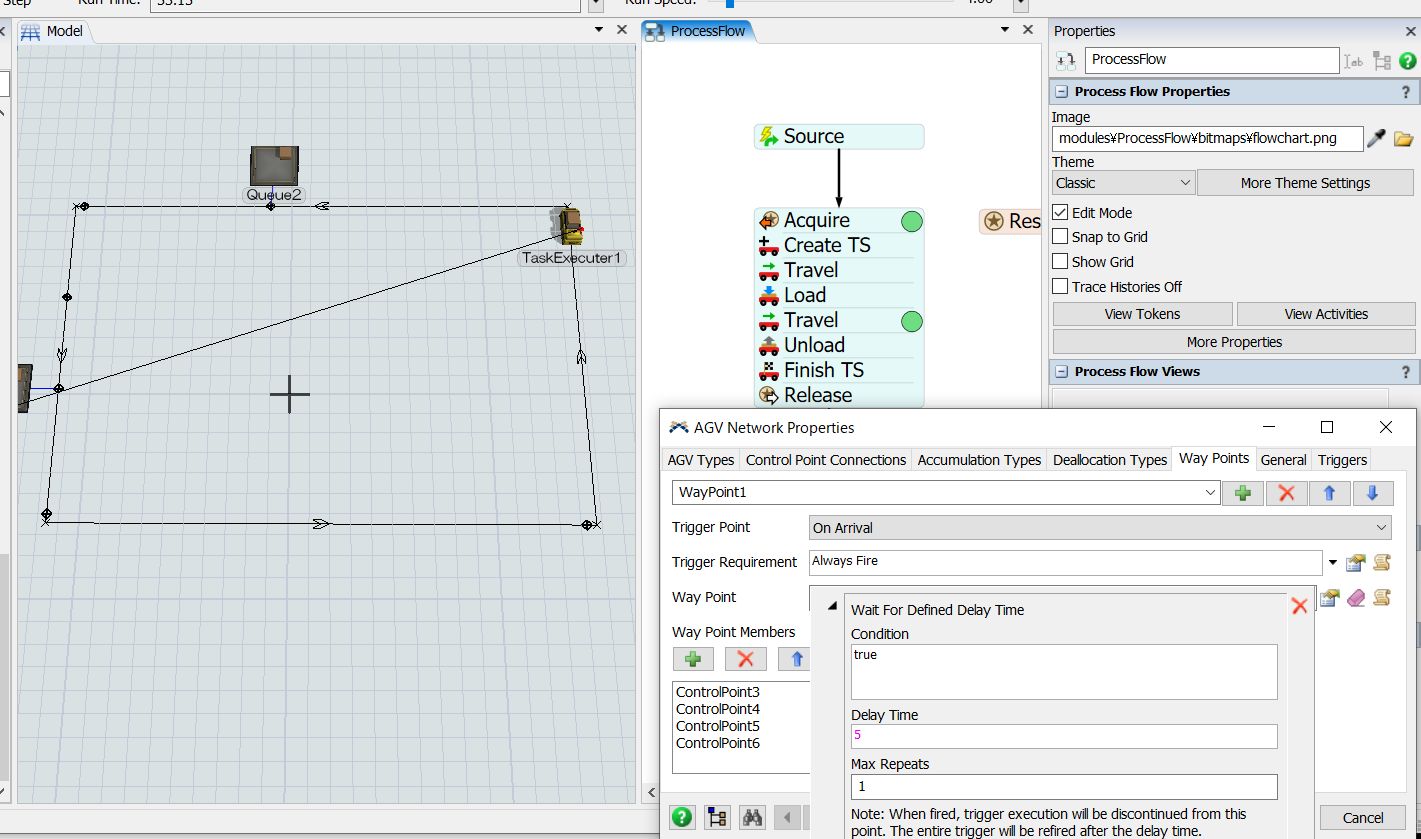
There is a controlpoint at every corner, and I'd like the avg to stop for certain moment at the corner. The stop time will be different between loaded and unloaded agv. What is the condition I should write at the waypoint 'Wait for defined delay time'?
How to set different delay time with load/unload for the waypoint
FlexSim 21.0.6
Hi @Ryosuke S, was Roi Sánchez's or Joerg Vogel's answer helpful? If so, please click the red "Accept" button at the bottom of one of their answers. Or if you still have questions, add a comment and we'll continue the conversation.
If we haven't heard back from you within 3 business days we'll auto-accept an answer, but you can always unaccept and comment back to reopen your question.
Hi @Ryosuke S , try to put this code in the Waypoint logic condition:
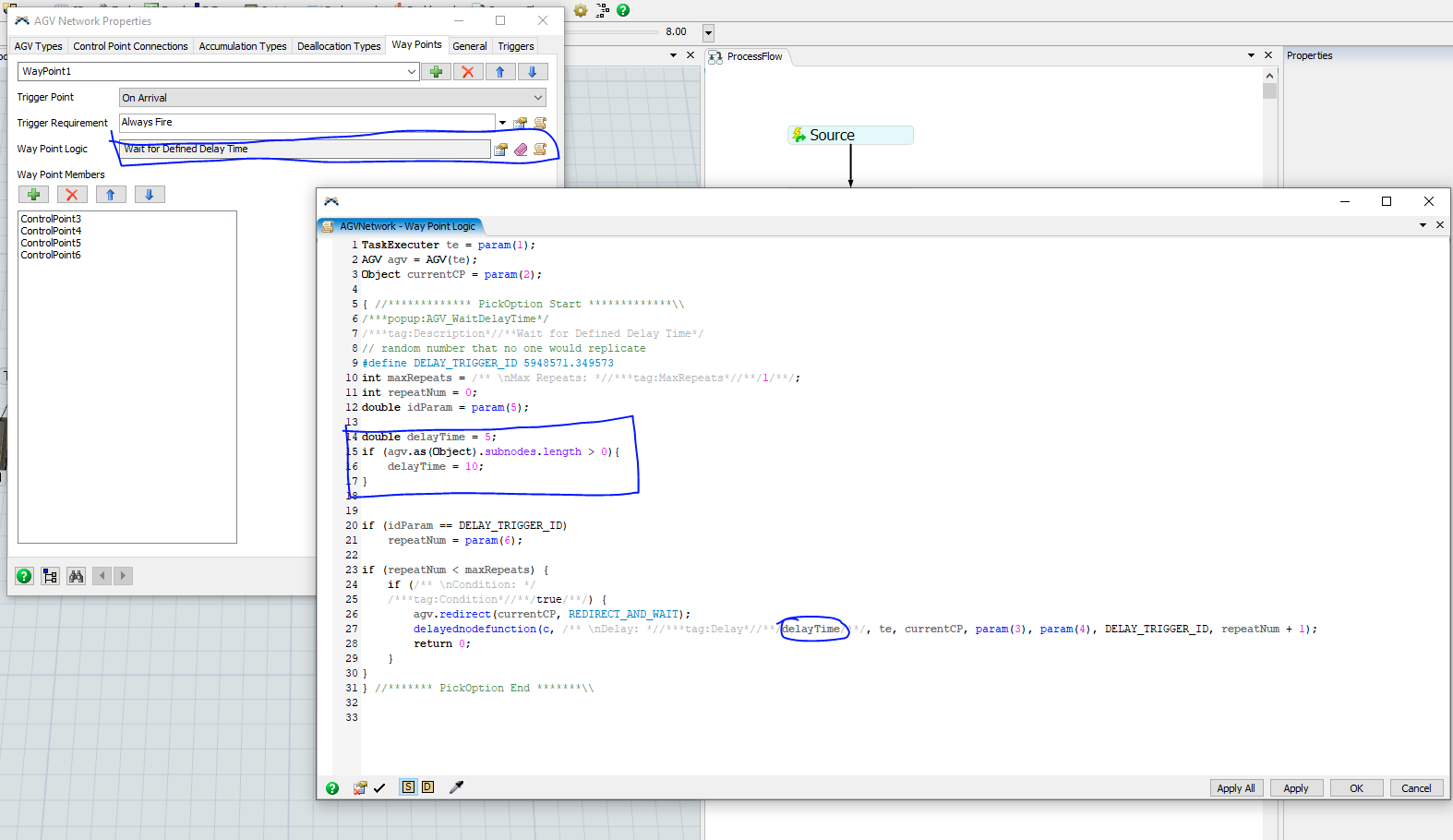
You don't need any logical comparision on property length. Any interger value larger than empty is true.
te.subnodes.length
19 People are following this question.