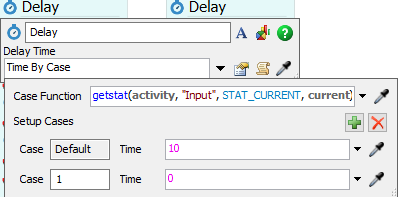
Delay time is applied to AGV Elevator in current modeling. The motion I want is that the first AGV goes through without delay. Delay time shall be applied to all subsequent agv.
It's a control I've always wanted to try, but I still don't know how to do