I have managed to recreate a UR5 robot model for my digital environment, however whenever I need to start some procedure to test it, it deforms as follows in the attached form:
The robot: 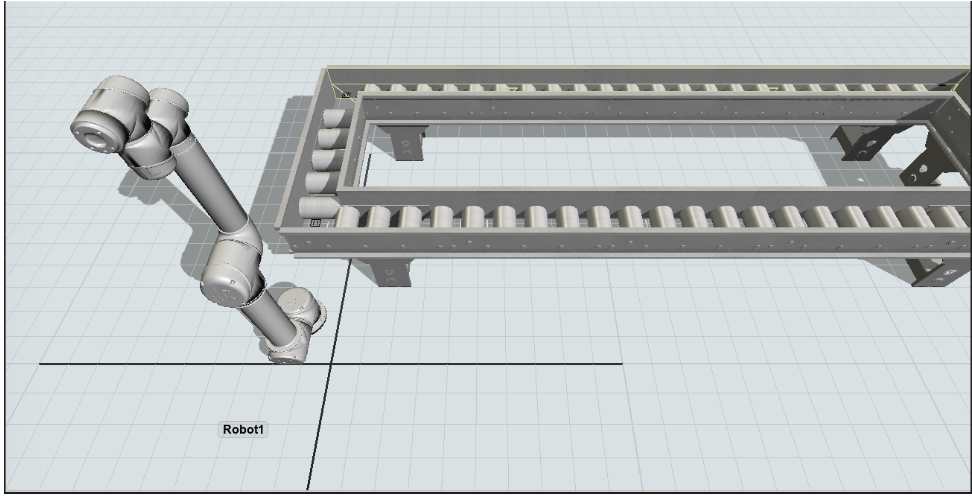
After Run: 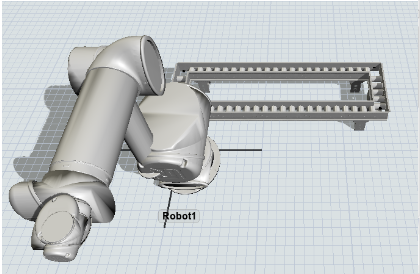
Could someone help me on how to solve this problem?
