Hi everyone,
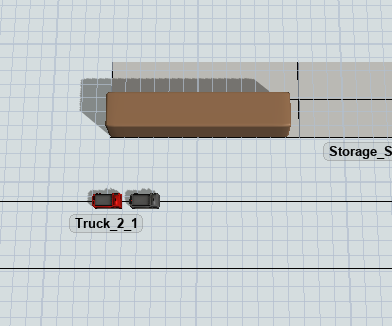
what I am trying to model is a truck driving to a specific location of a storage area in order to pick up a container. In this case the truck just needs to drive until the specific location and it does not have to load the container itself. That is why you don't see any load activities in the process flow.
In the model I attached, you can see the situation I aim to model represented by Case 1. That for me works without any problems. This option consists of having a control point per every BayID level, so we can pull the right control point and drive the agv there.
However, I was trying to consider some alternative logic to Case 1 in order to not have a gazillion of control points which will potentially make my model way heavier than expected.
I tried with both the AGV network and the Network Node. One drawback of the Network Node is that I don't have the option of the trailer feature.
In the model you can see the alternatives I tried. In all of them either I can't use the trailer (Network Node) or I lose that feature while trying to drive the AGV to a specific location for which i calculate the coordinates.
Any suggestion to achieve the behavior of Case 1 without using so many control points?
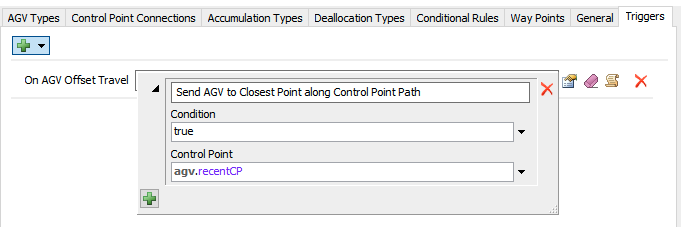
PS: a thing that I cannot understand is that the offset travel happens in case 2.2 and 3.2, where the Offset travel option is set to "Do not travel offset and block space on network".
Thank you in advance