Hello!
I have a model with many robots that gets faulted based on given MTBF MTTR function. I am sharing a demo model for someone who can provide a solution. I looking for help on adding below features. I tried multiple times/ways but did not get success.
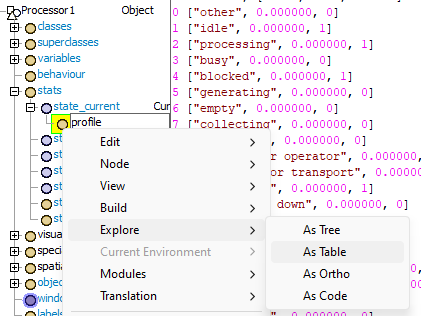
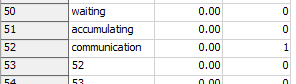
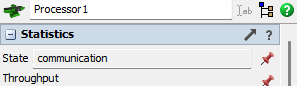
1. How would I add a delay for x minutes between the processer1 gets faulted and the dispatcher gets a message? The idea here is that I want to add some delay as a proxy for time taken for communication. On the processer, I want to track that time as STATE_COMMUNICATION. I do not find such state. If there is no way to add this customizable state, then I will use any existing state and rename that as Communication.
2. I also want to track the timers of Technicians separately in stead of just Travel Empty. Currently i tracks travel empty when he go to repair the fault and come back to home position. What I want is to track 'Travel repair' when he travels for repair and 'Travel Home' when he walks back to the home position.delayed_MTBF_MTTR.fsm
Thank you!