Currently, use process flow to build a single ASRS model
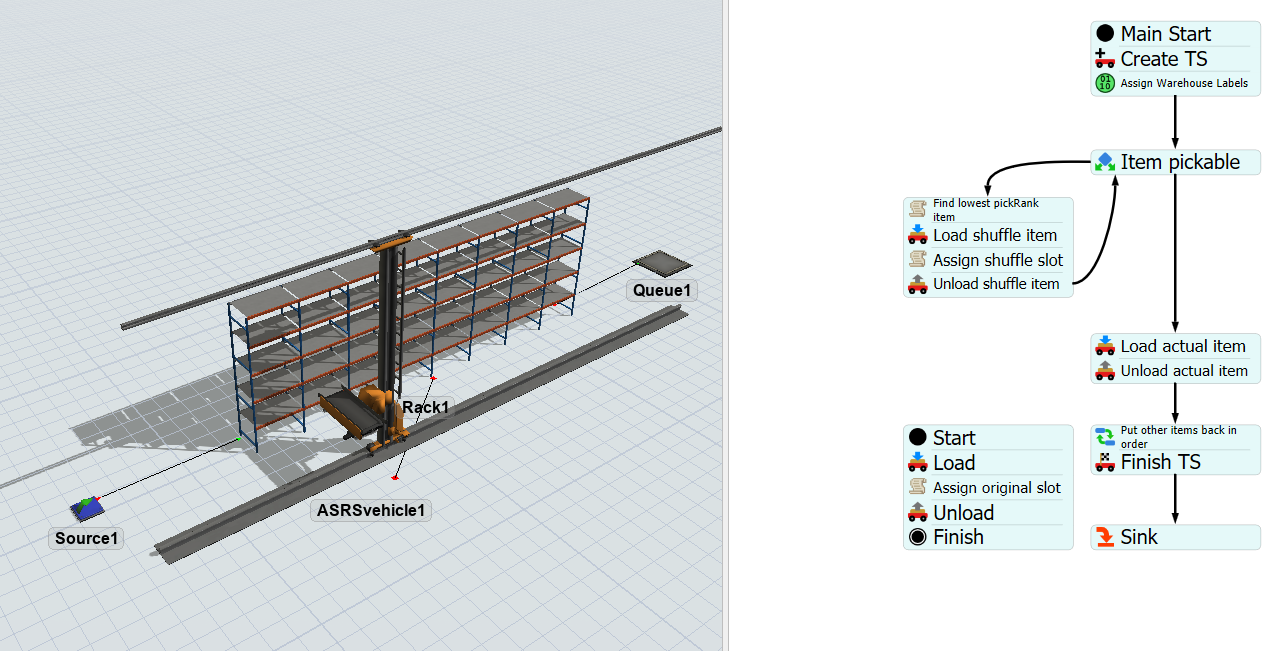
Can I use process flow to combine two ASRS?
Like the picture below?
Currently, use process flow to build a single ASRS model
Can I use process flow to combine two ASRS?
Like the picture below?
It is an interesting Task:
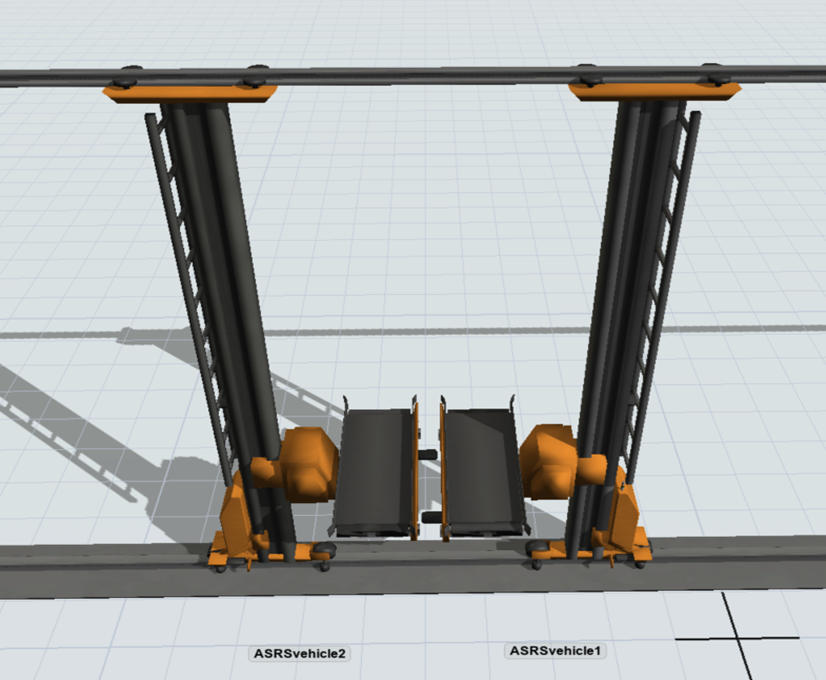
First or primary ASRS Vehicle is a dispatcher of second ASRS Vehicle. I connected first to second by an "A"-connection.
You can move an object into another object. If you do this with an ASRS vehicle the moved object is a subnode of the tray. Instead if this, you can move the second vehicle into an object of the drawsurrogate node (beam, car or runner).
Move objects into another is a feature of "Edit Selected Objects"-tool in View main menu tab. The feature gets executed by a button called "Move into Highlighted" in right workspace pane. Therefore an object must be selected (red wire frame) and container object must be highlighted (yellow wire frame). If you have not highlighted an object the button is called "Move into Model".
Unfortunately the second vehicle performs still its travel task. I switched it off by deactivating the kinematics node On Message trigger. The message goes out by On Task Start Trigger.
Attached model works quit sufficient with load and unload locations, if you transport 2 items. But if you want to have different load and unload destinations you have to build a logic to control any movement of primary ASRS Vehicle depending on delays of second vehicles tasksequences.
Edit: Discussion continued at this thread. There exists another example model to pick a deeper stacked item and restore front items back to same slot by this designed ASRS vehicle.
Thank you so much!
Can the problem of delay be solved by process flow?
There is a small bug, if the arrival style of the source is schedule or sequence, the dual asrs will only move once
If it is inter arrival time, it will continue to move
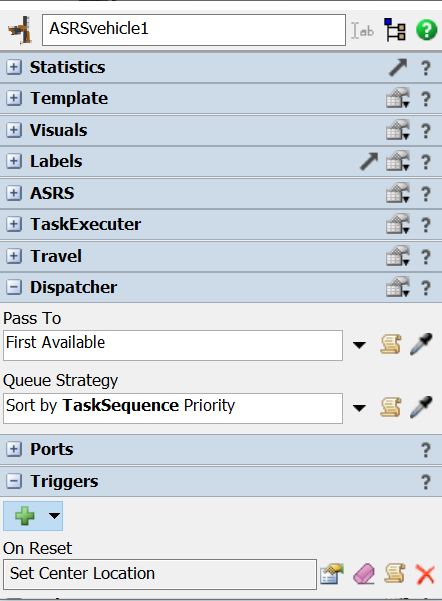
change on Dispatcher pane properties Sent to Port picklist option to "first available"
 Edit: if you add a new dispatcher object outside of both joined ASRS Vehicle and you disable the internal dispatcher connection between primary and secondary ASRS vehicle, Then this new dispatcher transfers tasksequences to both. If you connect the primary ASRS vehicle at first output port, then a single tasksequence gets executed. You should try to disable the output of this dispatcher after a few milliseconds and you can open the output once the joined ASRS double is empty again.
Edit: if you add a new dispatcher object outside of both joined ASRS Vehicle and you disable the internal dispatcher connection between primary and secondary ASRS vehicle, Then this new dispatcher transfers tasksequences to both. If you connect the primary ASRS vehicle at first output port, then a single tasksequence gets executed. You should try to disable the output of this dispatcher after a few milliseconds and you can open the output once the joined ASRS double is empty again.
Can move already!
Thank you so much, but seems to be able to handle only even orders perfectly
The last step would be a bit strange if it was singular
But it doesn't matter, it has helped a lot
I will continue to test, if there are related questions, I will ask them here
If it is a new question, it will be asked in the community again
14 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.