Hi Team,
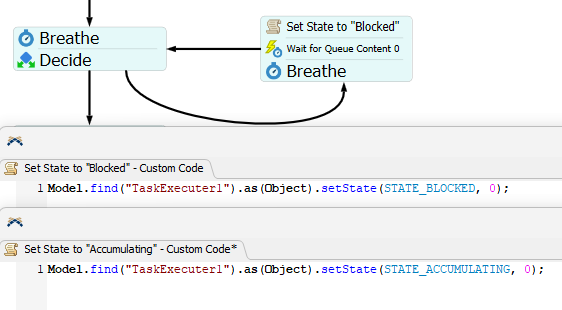
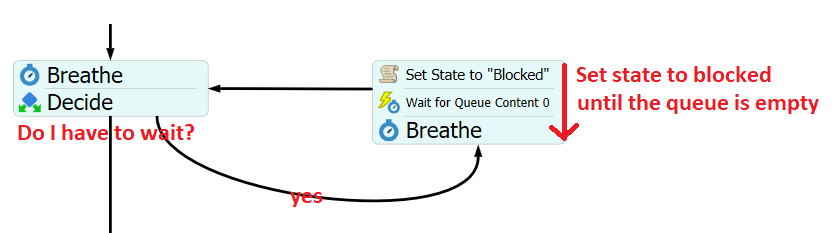
I am trying to set the AGV state to "Blocked" while it is at drop point but its state is not changing to "Blocked". By default, it's "idle". I have used here breathe activity just before changing the state but still it is not working.
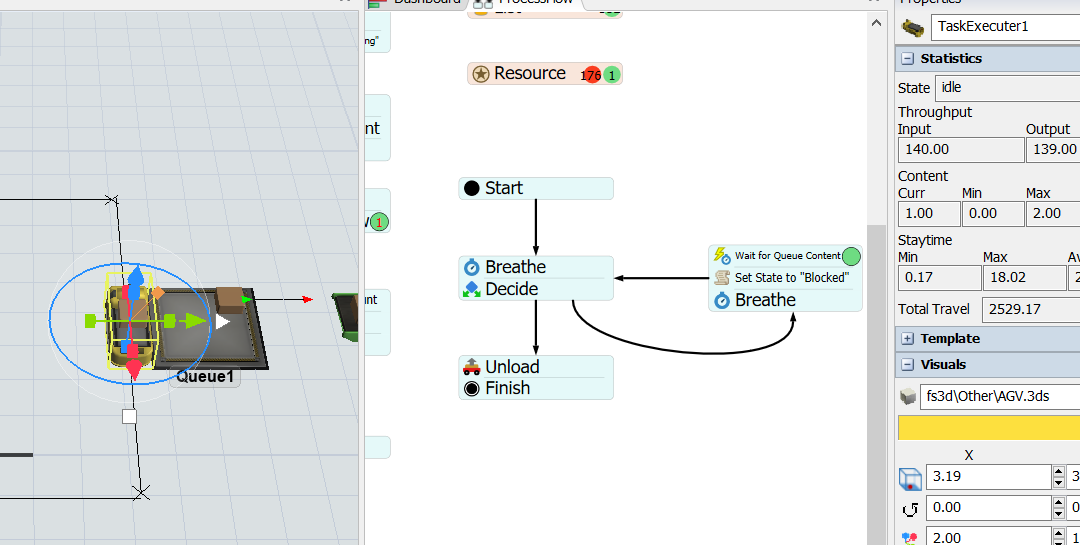
Can you help to understand where is the problem?
Thank you!
27.07.2023_Setting_AGV_State_While_Unloading.fsm